Download
1 / 26
260 likes | 423 Views
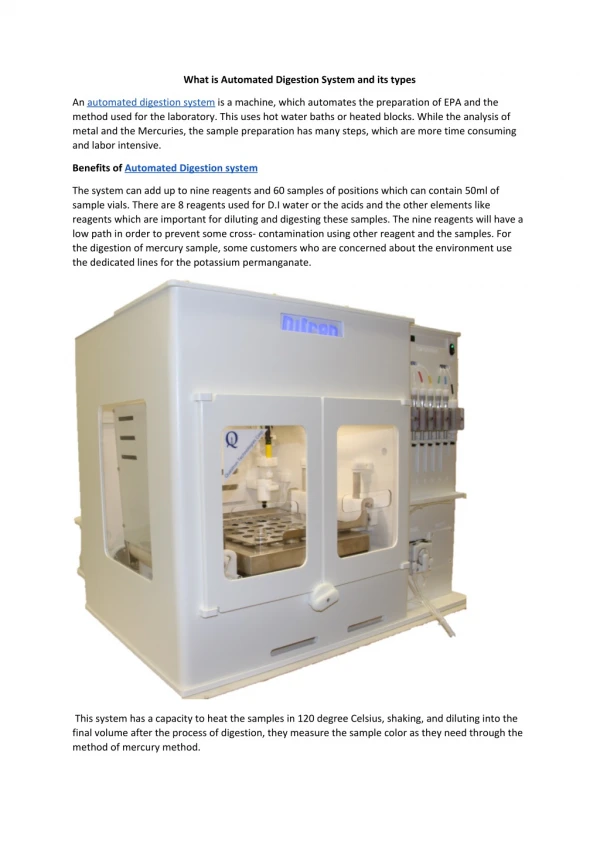
A.R.M.S. Automated Robotic Messaging System. William Batts Chris Rericha. Objective. Create a robotic vehicle capable of delivering papers and small packages throughout an office floor. Functional Overview. Identify unique office locations Follow a predetermined paths between locations

E N D
A.R.M.S.Automated Robotic Messaging System William Batts Chris Rericha
Objective Create a robotic vehicle capable of delivering papers and small packages throughout an office floor
Functional Overview • Identify unique office locations • Follow a predetermined paths between locations • Ability to avoid reasonably sized objects • Runtime user programmable destinations
Specifications • Obstacle detection range: 6” – 24” • Obstacle minimum size: 4” wide x 8” high • Maximum Number of Destinations: 14 • Barcode length: 5” • Minimum Obstacle/Barcode distance: 2’ • Maximum Package Weight/Size 1lb/8”x12”x1” • Minimum Runtime: 5 minutes
Analytical Component • IR Proximity Sensors • IR rangers set in “cross-fire” configuration to provide proper width (IR ranger beam only ~20º)
IR Ranger Calculations Given a maximum center-vehicle to IR beam distance of 6” and IR beam angle of ~>20 degrees, proper placement and unprotected areas may be calculated. IR Ranger Placement Angle: Θ = arctan(Inner bound / Sensor-to-centerline) + (Beam angle / 2) Θ = arctan(6/3.5) + (20/2) Θ ≈ 70 degrees
IR Ranger Calculations (cont’d) Unprotected Sides It is possible for a mobile object to move into an unprotected side area after the primary IR beam has passed Length of Unprotected Area: L= Distance from opposite IR ranger * tan (Θ - 10) L = 7.5 * tan(60) L = 13” Maximum Width of Unprotected Area W = L tan (20/2) W = 13 * tan(10) W= 2.3” This blind spot only applies to mobile objects which will likely move into the IR beam before striking the vehicle
Opto-reflector Calculations • QRD1114 (Shaft Encoding) • Datasheet optimum range: 1.27 millimeters • Placement will be ~1mm from wheel surface • 1” barcode segments, 2.5” wheel, 31 shaft encodings = minimum 3 samples per barcode segment (.25” per shaft encoding) • QRB1114 • Datasheet optimum range: 3.81 millimeters • Placement will be ~4mm from hard-flat surface (due to carpet pile sink)
Obstacle Avoidance • Upon obstacle detection the vehicle will stop • Re-examine path after a short period of time • If obstacle remains, deviate from given path • Intelligently determine avoidance solution
Path Sensing • Front opto-reflectors will actively detect predetermined path edge • When detected, vehicle will change track speed to move toward side of detection. • Center opto-reflector serves as “sanity check” for path reacquisition during obstacle avoidance
Barcode Reading • Opto-reflector used to read barcode • Detect barcode header • Move to middle of first bit (MSB) and record value • Continue through all four bits of barcode
Hardware • Fast Traxx Vehicle • Motorola 68HCS12 Microprocessor • Sharp GP2Y0D02YK IR Ranger • TI SN75441 Quad Half H-Bridge DC Motor Driver • Fairchild QRB1114 and QRD1114 Infrared Photosensors
William Opto-Reflector Testing Obstacle Avoidance Path Sensing Shaft Encoder DC Motor Interface Chassis Construction Component Testing Chris IR Ranger Testing User Interface Barcode Reading Program “kernel” PC Application System Test Component Testing Work Division
Work Completed • Sensor testing and interface design • Initial chassis construction and sensor placement • Initial motor interface design • Automatic barcode generation • Microcontroller sensor test • Preliminary software and UI design
William’s Work Barcode and Path Sensing • Optimal distance to reflective surface is 4 mm • Very reliable, rejects ambient light Shaft Encoders • Optimal distance to reflective surface is 1 mm
William’s Work (Cont’d) • Initial chassis construction
William’s Work (Cont’d) • Initial DC motor interface design
Chris’ Work Sharp IR Rangers Testing • Senses from 0.5” to 34” • Reliably to 24” • Detects objects in dim, halogen, and daylight equally successfully • Detects objects of all colors in the visible spectrum equally well
Chris’ Work (Cont’d) • 24-bit bitmap barcodes automatically generated • Sensor pin placement • Sensor and system initialization code • Microcontroller sensor test
Work to Complete • Chassis and Sensor Mounting • DC Motor to Microcontroller Integration • Formal Algorithm Block Diagram and Implementation • Software Kernel and System Initialization • PC Application to Microcontroller Design • User Interface Construction • System Testing and Verification
Test Plan • Test each sensor type for performance • Develop a mini test for each component to verify • Perform a code review for each software component • Test basic sensor and movement ability on constructed vehicle
Test Plan (Cont’d) • Test vehicle moving over barcodes at different possible angles of deviation • Test vehicle on all different types of paths • Test all combinations of obstacles and in varying daylight and obstacle colors • Let complete system run for many hours through varying paths to work out performance bugs
Potential Safety Problems • Vehicle may lose path and wander • Remedied though search pattern (octagon) and timeout • Kill button mounted for quick stop