Download
1 / 26
260 likes | 286 Views
This article presents a method for reconstructing piecewise smooth surfaces from noisy point clouds, dealing with sharp features. The method uses robust moving least-squares fitting to identify and reconstruct sharp features with improved stability.

E N D
Robust Moving Least-squares Fitting with Sharp Features Shachar Fleishman University of Utah Daniel Cohen-Or Tel-Aviv University Cl´audio T. Silva University of Utah
Surface reconstruction • Noise • Smooth surface • Smooth sharp features • Method for identifying and reconstructingsharp features
Background • Need to model real-world 3D geometry acquired by range scanners. • The output is a raw point set,it is noisy and rough.
Related work • Moving least-squares surfaces • Surface reconstruction • Robust statistics methods
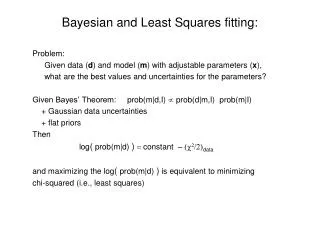
Methods used Least median of squares: Searching for parameters that minimizes the median of the residuals:
Methods used Equation can be solved using the following algorithm: 1)points are selected at random, and a model is fitted to the points. 2) the median , of the residuals of the remaining points is computed. The process is repeated times to generate candidate models. 3) the model with minimal, is selected as the final model.
Methods used Forward search and iterative refitting: • Begins witha smalloutlier-free subset • Then iterativelyrefines the model • Monitor the search
Methods used Forward search and iterative refitting: Residual plot residuals # samples
Methods used • Noise-free, flat region
Methods used • Noisy, flat region
Methods used • Noise-free regionwith an edge
Methods used • Noisy region with an edge
Proposed method • Gets a set of points S as an input • Classifies the point set using forward search algorithm • Presents projection operator
Limitations and future work • The presented projection operator defines a piecewise smooth surface, however the curve of the edge that is defined by the operator may not be smooth. • Extending the projection operator such that the edge of the curve will be piecewise smooth can be considered in future works.
Conclusion • Proposed method deals with reconstructing a piecewise smooth surface from a point cloud • Advantages: • Operates well in the presence of noise • Capable of reconstructing of sharp features • Improves the stability of the projection operator
Questions Q1) What is your attitude to this article, share your thoughts? A1) Proposed method has shown good results, however this article is quite old and may be considered as a classy work in the area of surface reconstruction, so there are some aspects to be extended in this algorithm, such as reconstructing of a smooth edge and dealing with ambiguity of reconstructed surface.
Questions Q2) Formula is called median least of squares, but where are the squares here? A2) Square is replaced by absolute value of the residual. It can be also considered as:
Questions Q3) Why outliers are projected to the intersection? A3) Outliers are projected not only to the intersection, it depends on the area where the outlier was found. As described on the picture below: only points from the red area will be projected on the inter-section
Questions Q4) If the angle of a sharp feature is very small, there can be an ambiguity. How to solve it? A4) Such ambiguity can not be soled by proposed in the article algorithm. It may depend on some parameters, especially on the threshold: we can set the threshold very small to identify sharp features with very small angle, however it will make our algorithm sensitive to noise and outliers
Questions Q5) Why do the authors use median instead of average in the formula? A5) Because this is the robust statistics method which should deal with outliers. average median