Download
1 / 24
240 likes | 250 Views
This paper explores the detection of multi-stability in biological feedback systems, including reasons and uses for bi-stability and the state-of-the-art in detecting multi-stability. It presents a game plan for detecting multi-stability, as well as an example using the Cdc2-Cyclin B/Wee1 system and the Mos/MEK/p42 MAPK Cascade. The paper also discusses the main ideas of breaking the feedback and inferring properties of closed-loop systems by open-loop analysis.

E N D
Detection of multi-stabilityin biological feedback systems George J. Pappas University of Pennsylvania Philadelphia, USA
Bio Bi-stability • Even simple signaling networks result in bi-stability • Bistability: Toggling between two alternative steady state • Reasons/uses for bi-stability • Switch-like biochemical responses • Mutual exclusive cell cycle phases • Production of biochemical memories • Rapid propagation of receptor activation
Bi-stability • (a) arises in systems with positive feedback loops • (b) mutually inhibitory, double negative feedback, • (c) Realistic biological networks with positive/negative feedback
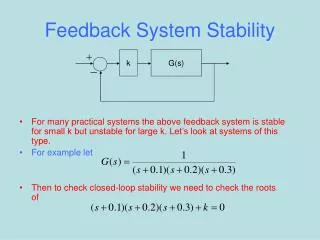
State-of-the-art in detecting multi-stability • Positive feedback is necessary but not sufficient • Graphical phase analysis available for 2D systems
Game plan • 2D example : Cdc2-Cyclin B/Wee1 System • Develop framework for detecting multi-stability • Show modularity and scalabilty of approach • 5D example : Mos/MEK/p42 MAPK Cascade
Cdc2-Cyclin B/Wee1 (two-protein) system • Assumptions: Each protein exists in only two forms • Active/inactive Cdc2 (variables x1,x2) • Active/inactive Wee1 (variables y1,y2) • Inhibition is approximated by a Hill equation
Cdc2-Cyclin B/Wee1 (two-protein) system • Assumptions: Each protein exists in only two forms • Active/inactive Cdc2 (variables x1,x2) • Active/inactive Wee1 (variables y1,y2) • Inhibition is approximated by a Hill equation
Cdc2-Cyclin B/Wee1 (two-protein) system • Constants : Rate constants alpha, beta • Ks are the Michaelis (saturation) constants • gamma are the Hill coefficients • v is the gain (strength) of Wee1 on Cdc2
Cdc2-Cyclin B/Wee1 (two-protein) system X1+X2=1 Y1+Y2=1
Cdc2-Cyclin B/Wee1 (two-protein) system • 2D phase plane analysis • Approach does not scale to higher dimensions
Key idea : Break the feedback • Feedback system • breaking the feedback results in open loop system • Main idea : Infer properties of closed-loop by open-loop Re-closing loop w=n= v y1
Rough Theorem (from open to closed loop) • Assume the open loop system • satisfies two critical properties • (Well-defined Steady State) For every constant input, there is a unique steady state response. • (I/O Monotone) There are no possible negative feedback loops, even when the system is closed under positive feedback • then the closed loop system • A) has three steady states • B) Almost all trajectories converge to one of two attracting equilibria
Property A : Well-defined Steady State • For the open loop system • we must have that for every constant (unit step) input, there is a • unique steady state • Red curve in figure below • (only output y1 is shown) = Note that this may be a hard thing to do!
Property B : I/O Monotonicity • Main idea : Use the (directed) incidence graph of the system • Important : Effect of one variable on another must have the same • sign globally. Otherwise their result does not apply. • For example, w affects derivative x1 in a globally decreasing manner. • Self-loops (for example –ax1 decay) are not included in the graph
Property B : I/O Monotonicity • Main idea : Use the (directed) incidence graph of the system • Path Sign : Sign of a path is the product of the signs along the way • Monotonicity property • (i) Every loop in the graph, directed or not, is positive • (ii) All paths from input to output are positive • (iii) There is a directed path from input to all states • (iv) There is a directed path from all states to output
Application of main result • Main idea : Use the (directed) incidence graph of the system • Both properties have been verified. The potential equilibria are at • intersection of sigmoidal red curve and line Stable : Red curve slope < 1 Unstable : Slope > 1 Hill coefficient > 1 important Bistability needs cooperativity Almost all trajectories converge to one of the stable equilibria
Monotonicity is necessary • Consider the Predator-prey like open loop system • satisfies one critical property (no monotonicity) • (Well-defined Steady State) For every constant input, there is a unique steady state response. • then the closed loop system • A) has multiple steady states • B) Almost all trajectories converge to one of two attracting equilibria
Claim is false – System not monotone • Consider the Predator-prey like open loop system • Then a similar analysis results in No global bi-stability Limit cycles exist
Modularity, scalability • Key result : Cascade (series) composition of monotone systems is • monotone ! • Therefore, multi-stability analysis of large biological networks, can be • deduced from analysis of smaller networks. • The Mos/MEK/p42 MAPK Cascade
A 5D case study • The Mos/MEK/p42 MAPK Cascade • After 7D modeling and elimination of 2 conserved quantities, we get After feedback breakup, this is a cascade composition of one 1D and two 2D systems Property A and B are composable. Thus 5D systems satisfies conditions. Hence system is multi-stable
The computational story : How many ? • Numerical simulations to determine the global critical function For SISO systems, Figure c above is always planar
Summary • Outstanding paper : Outstanding systems paper with • potential impact in biology/networks. • Pushes systems thinking and potentially bio results • More complicated inter-connections possible. • Many future directions to consider, from a systems point • Monotone, on the average • Density functions for monotone systems • Compositions/decompositions to monotone systems