Download
1 / 6
130 likes | 551 Views
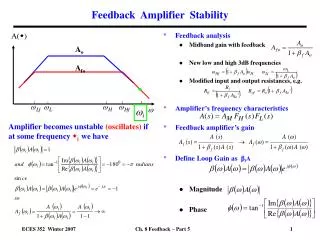
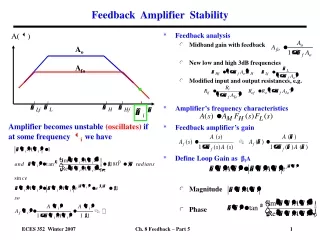
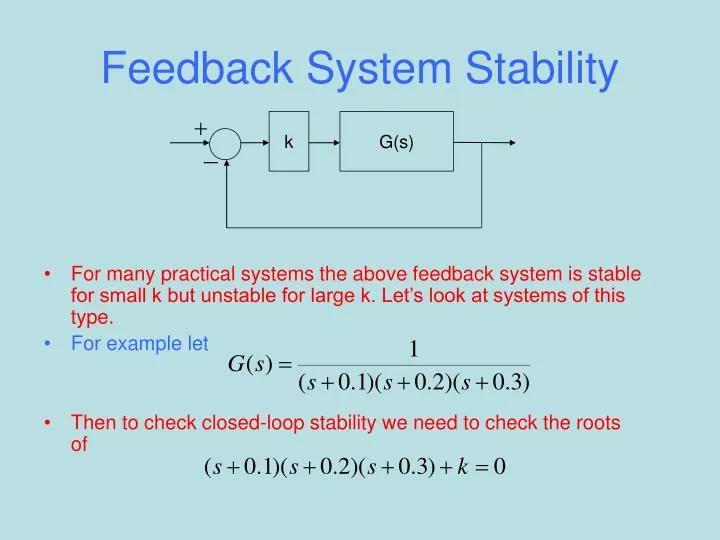
k. G(s). Feedback System Stability. For many practical systems the above feedback system is stable for small k but unstable for large k. Let’s look at systems of this type. For example let Then to check closed-loop stability we need to check the roots of. Closed-loop Poles. Let Then

E N D
k G(s) Feedback System Stability • For many practical systems the above feedback system is stable for small k but unstable for large k. Let’s look at systems of this type. • For example let • Then to check closed-loop stability we need to check the roots of
Closed-loop Poles • Let • Then • The sum of closed-loop poles is constant and equal to -0.6.
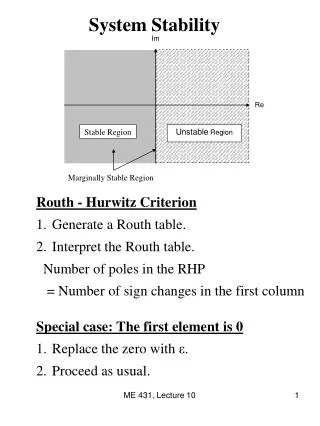
Closed-loop poles and k • As k is increased from 0 to 0.05, the closed-loop system has only one real and two imaginary poles. • The real pole goes more negative as k increases so the real part of the imaginary poles must become less negative since the sum of the poles is constant. • This means as k increases the real part of the closed-loop imaginary poles will become positive. • And so there will be one value of k, let’s call it k*, for which the real part of the imaginary closed-loop poles will be zero, i.e, 2 , 3 is ±j* for some *.
Is k < k* or k=k* or k > k*? • Find out k* from the frequency response and if our k is less than k* the closed-loop system is stable, if k is equal to k* it’s marginally stable and if k is greater than k* then it’s unstable.
//cubic polynomial roots //2 August 2005 //exec('cubic.sce') s=poly(0,'s'); k=0.05;//0.06; x=[-0.8:0.01:0.0]; x1=0.1;x2=0.2;x3=0.3; y=(x+x1).*(x+x2).*(x+x3)+k; f1=scf(1);clf(f1,'reset'); plot2d(x,y);xgrid; xtitle('Third Order Polynomial', 'x','y'); den=poly([x1*x2*x3+k (x1*x2+x1*x3+x2*x3) (x1+x2+x3) 1],"x","coeff"); abc=roots(den) s1=sum(abc); //sum of the three roots disp(s1, 'sum of roots = ') //s1=sum(abc) //sum of the three roots h=syslin('c',1,x1*x2*x3+(x1*x2+x1*x3+x2*x3)*%s+(x1+x2+x3)*%s^2+%s^3); [g,fr]=g_margin(h); f2=scf(2);//clf(f2,'reset'); bode(h,0.001,10);