Download
1 / 1
10 likes | 130 Views
Artificial Intelligence Car Retrieval Research Project Ronald Benson, Tyshun Jones, Sihle Wilson, Jason T. Black, PhD ronald1.benson@famu.edu, tyshun1.jones@famu.edu, sihle1.wilson@famu.edu , jblack@cis.famu.edu. OPTIONAL LOGO HERE. OPTIONAL LOGO HERE. Decision Making Strategy. Introduction.

E N D
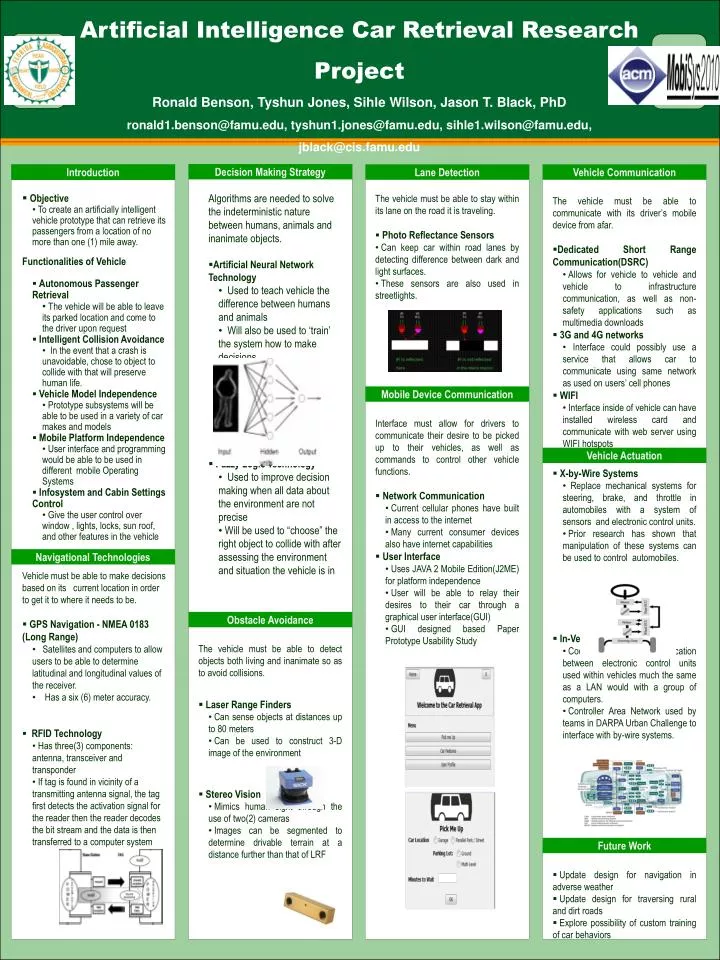
Artificial Intelligence Car Retrieval Research Project Ronald Benson, Tyshun Jones, Sihle Wilson, Jason T. Black, PhD ronald1.benson@famu.edu, tyshun1.jones@famu.edu, sihle1.wilson@famu.edu, jblack@cis.famu.edu OPTIONALLOGO HERE OPTIONALLOGO HERE Decision Making Strategy Introduction Lane Detection Vehicle Communication • Algorithms are needed to solve the indeterministic nature between humans, animals and inanimate objects. • Artificial Neural Network Technology • Used to teach vehicle the difference between humans and animals • Will also be used to ‘train’ the system how to make decisions • Fuzzy Logic Technology • Used to improve decision making when all data about the environment are not precise • Will be used to “choose” the right object to collide with after assessing the environment and situation the vehicle is in • Objective • To create an artificially intelligent vehicle prototype that can retrieve its passengers from a location of no more than one (1) mile away. • Functionalities of Vehicle • Autonomous Passenger Retrieval • The vehicle will be able to leave its parked location and come to the driver upon request • Intelligent Collision Avoidance • In the event that a crash is unavoidable, chose to object to collide with that will preserve human life. • Vehicle Model Independence • Prototype subsystems will be able to be used in a variety of car makes and models • Mobile Platform Independence • User interface and programming would be able to be used in different mobile Operating Systems • Infosystem and Cabin Settings Control • Give the user control over window , lights, locks, sun roof, and other features in the vehicle • The vehicle must be able to stay within its lane on the road it is traveling. • Photo Reflectance Sensors • Can keep car within road lanes by detecting difference between dark and light surfaces. • These sensors are also used in streetlights. • The vehicle must be able to communicate with its driver’s mobile device from afar. • Dedicated Short Range Communication(DSRC) • Allows for vehicle to vehicle and vehicle to infrastructure communication, as well as non-safety applications such as multimedia downloads • 3G and 4G networks • Interface could possibly use a service that allows car to communicate using same network as used on users’ cell phones • WIFI • Interface inside of vehicle can have installed wireless card and communicate with web server using WIFI hotspots Mobile Device Communication • Interface must allow for drivers to communicate their desire to be picked up to their vehicles, as well as commands to control other vehicle functions. • Network Communication • Current cellular phones have built in access to the internet • Many current consumer devices also have internet capabilities • User Interface • Uses JAVA 2 Mobile Edition(J2ME) for platform independence • User will be able to relay their desires to their car through a graphical user interface(GUI) • GUI designed based Paper Prototype Usability Study Vehicle Actuation • X-by-Wire Systems • Replace mechanical systems for steering, brake, and throttle in automobiles with a system of sensors and electronic control units. • Prior research has shown that manipulation of these systems can be used to control automobiles. • In-Vehicle Networks • Coordinate communication between electronic control units used within vehicles much the same as a LAN would with a group of computers. • Controller Area Network used by teams in DARPA Urban Challenge to interface with by-wire systems. Navigational Technologies • Vehicle must be able to make decisions based on its current location in order to get it to where it needs to be. • GPS Navigation - NMEA 0183 (Long Range) • Satellites and computers to allow users to be able to determine latitudinal and longitudinal values of the receiver. • Has a six (6) meter accuracy. • RFID Technology • Has three(3) components: antenna, transceiver and transponder • If tag is found in vicinity of a transmitting antenna signal, the tag first detects the activation signal for the reader then the reader decodes the bit stream and the data is then transferred to a computer system Obstacle Avoidance • The vehicle must be able to detect objects both living and inanimate so as to avoid collisions. • Laser Range Finders • Can sense objects at distances up to 80 meters • Can be used to construct 3-D image of the environment • Stereo Vision • Mimics human sight through the use of two(2) cameras • Images can be segmented to determine drivable terrain at a distance further than that of LRF Future Work • Update design for navigation in adverse weather • Update design for traversing rural and dirt roads • Explore possibility of custom training of car behaviors