Download
1 / 7
70 likes | 86 Views
Discover the direct analogies between linear and rotational motion in physics, including position, velocity, acceleration, inertia, momentum, and torque. Understand the concepts with examples and applications.

E N D
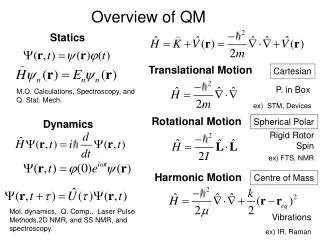
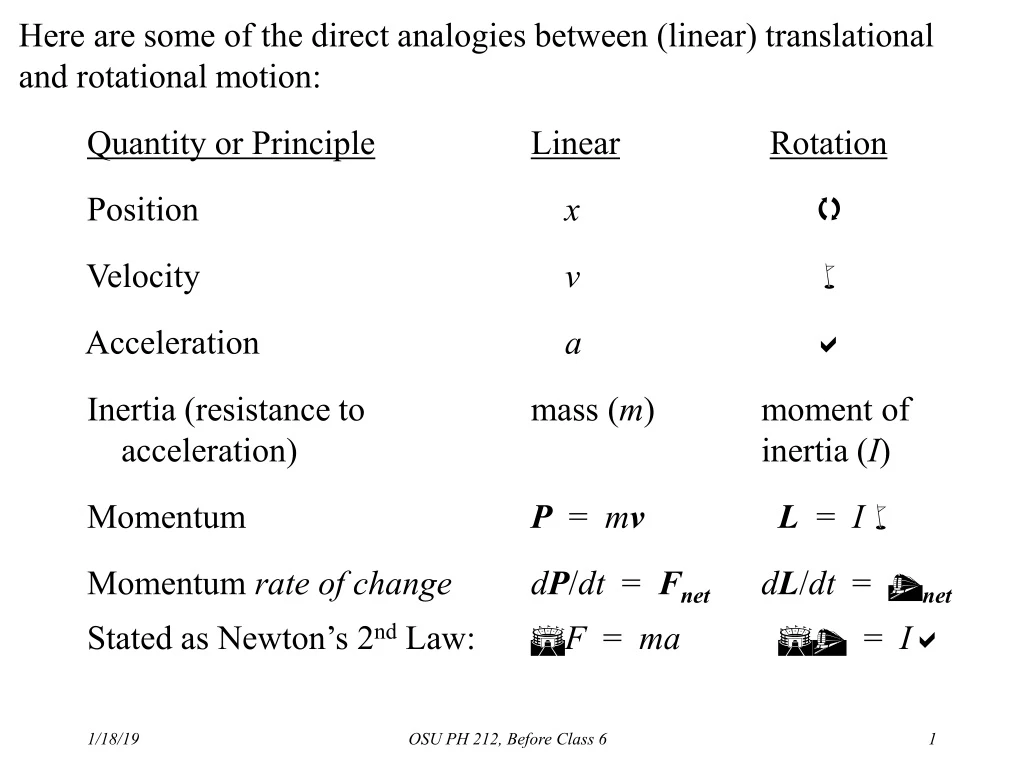
Here are some of the direct analogies between (linear) translational and rotational motion: Quantity or PrincipleLinearRotation Position x Velocity v Acceleration a Inertia (resistance to mass (m) moment of acceleration) inertia (I) Momentum P= mvL= Iw Momentum rate of changedP/dt = FnetdL/dt = net Stated as Newton’s 2nd Law: F = ma = Ia OSU PH 212, Before Class 6
What is a torque? It is a “twisting” force that causes angular acceleration in a rigid body—usually caused by a linear force acting at some point on the body, causing it to rotate about some axis. If the body is not constrained (“pinned”), the rotation axis will be the body’s center of mass (c.m.). Torque is a vector (rxF), positive when its twisting effect is counter-clockwise; negative if clockwise. An easy way to compute this is = r(F·sin) where r is the distance from the axis of rotation to the point where F is acting on the body, and is the angle between F and r. See Figure 12.18 in the textbook (and also Figure 12.20 for an alternative approach). Torque has units of force·distance (N·m). OSU PH 212, Before Class 6
You are using a wrench to tighten a lug-nut on a car tire. Which of these four arrangements shown is most effective? A. 1B. 2C. 3D. 4E. All the same OSU PH 212, Before Class 6
You are using a wrench to tighten a lug-nut on a car tire. Which of these four arrangements shown is most effective? A. 1B.2C. 3D. 4E. All the same OSU PH 212, Before Class 6
10.0 kg 30.0 kg Look back for a moment at aproblem we’ve already done:A straight, rigid, massless rod oflength 1.00 m connects the point masses. Where must you locate a fulcrum (support point) so that the object balances (does not tip) with gravity?(Answer: x = 0.750 m)Notice that in locating the fulcrum at the center of mass, we effectively balanced the torques acting on the rod; those torques summed to zero. We prevented the stick from accelerating rotationally—i.e. in the angular sense: 0.25 m 0.75 m 294 N 98 N • = +(98·0.75) • = +73.5 N·m • = –(294·0.25) • = –73.5 N·m OSU PH 212, Before Class 6
So: Newton’s First Law must include rotational motion, too. • A rigid body is in total mechanical equilibrium only when it is not accelerating along any translational axis; and when it’s not acceler-ating around any rotational axis. That is, it’s in total mechanical equilibrium only when: F = 0 and = 0 • But more generally: The two parts of Newton’s 2nd Law together address all cases—when a rigid body is or is not in mechanical equilibrium. That is, these statements must both be true always, no matter whether a or a are zero or not: F = maand = Ia OSU PH 212, Before Class 6
And notice how summing both torques and forces can work together as a tool set to help you solve problems. Sometimes you need to apply both tools together; sometimes you need only one at a time. Try, for example, item 3d in the Prep 3 set… Then this separate question: What force is the fulcrum exerting on the board so that it remains at rest? (Answer: Ffulcrum.board = [–42.4, 123] N, assuming conv. x-y axes.) OSU PH 212, Before Class 6