Download
1 / 14
140 likes | 153 Views
Explore ROM and RAM memory structures, assembly language programs, I/O port programming, timers/counters, and interrupts in microcontroller systems.

E N D
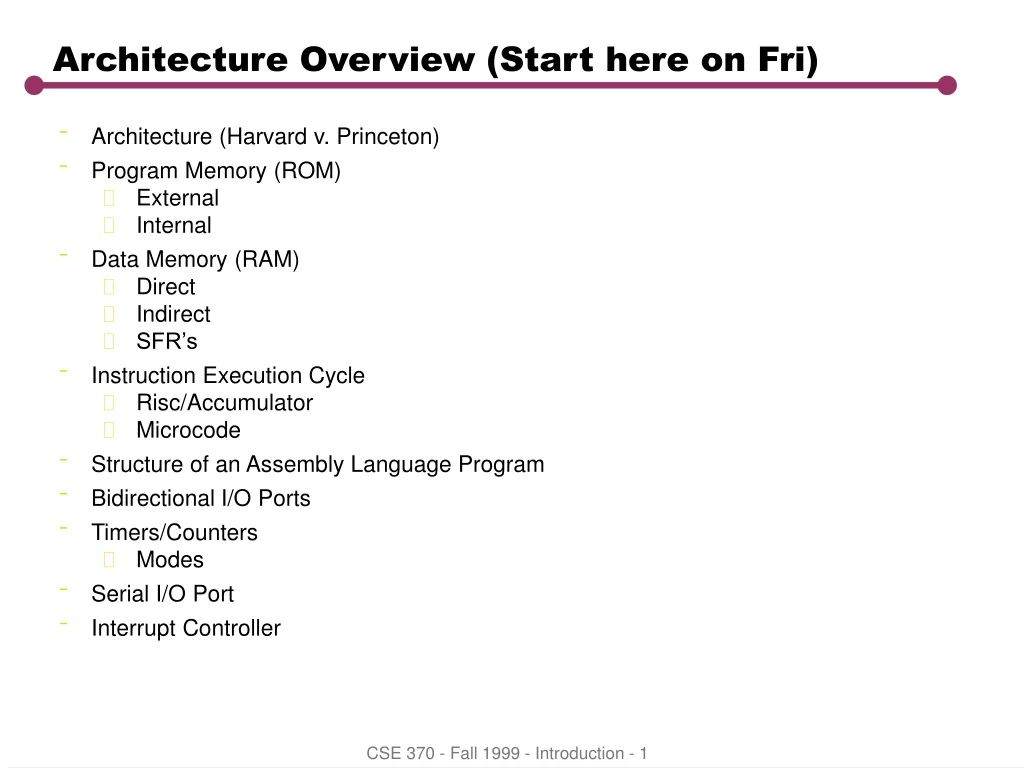
Architecture Overview (Start here on Fri) • Architecture (Harvard v. Princeton) • Program Memory (ROM) • External • Internal • Data Memory (RAM) • Direct • Indirect • SFR’s • Instruction Execution Cycle • Risc/Accumulator • Microcode • Structure of an Assembly Language Program • Bidirectional I/O Ports • Timers/Counters • Modes • Serial I/O Port • Interrupt Controller CSE 370 - Fall 1999 - Introduction - 1
Simple Princeton Architecture ROM Linear Address Space W/ Mem Mapped IO/SFR’s I/O Port PC IR GPRs SP Timer, SFR’s RAM address Reset Vector ALU Interrupt Vect IR mux data Status Control CSE 370 - Fall 1999 - Introduction - 2
Analysis • Bottleneck into and out of memory for data and code • Use of critical 8-bit address space (256) for memory mapped I/O and special function registers (timers and their controllers, interrupt controllers, serial port buffers, stack pointers, PC, etc). For example, the Motorola 6805 processor has only 187 RAM locations. • But, easy to program and debug. Compiler is simple too. CSE 370 - Fall 1999 - Introduction - 3
8051: Modified Harvard Architecture PC mux address RAM SFR’s (direct) Internals Reset Vector Usually Stack (indirect) Interrupt Vect ALU Interrupt Vect Interrupt Vect 8051 standard + Enhancements (indirect or Direct) Bit Addressable Status Reg. Banks data Control CSE 370 - Fall 1999 - Introduction - 4
8051 Memory Architecture • Advantages • Simultaneous access to Program and Data store • Register banks great for avoiding context switching on interrupt and for code compression • 8-bit address space extended to 256+128 = 384 registers by distinguishing between direct and indirect addressing for upper 128 bytes. Good for code compression • Bit addressable great for managing status flags • Disadvantage • A little bit confusing, with potential for errors. CSE 370 - Fall 1999 - Introduction - 5
Instruction Execution • 6 states/machine cycle, 2 clocks/state = 12 clocks/machine cycle. Some instructions take two machine cycles, most take one. • Can make two ROM accesses in on memory cycle? (three byte inst) • More like CISC than RISC • Interesting features • No Zero flag (test accumulator instead) • Bit operations • Read Modify Write operations (ports) • Register to Register Moves • Integer arithmetic • Signed arithmetic • Byte and Register Exchange operations CSE 370 - Fall 1999 - Introduction - 6
Assembly Programming • Declare Segments and Segment types • Assembler converts to machine code, with relocatable segments. • Linker perform absolute code location • Segments • DATA • IDATA • PDATA • XDATA • CODE • CONST • Example Assembly Program CSE 370 - Fall 1999 - Introduction - 7
Anatomy of an Assembly Program Look for overflow in C – difficult to do unsigned int i; void main (void) { unsigned int tmp; while (1) { P1^= 0x01; i = 0; do { tmp = i; i += P2; } while (tmp < i); } } Note i is global and tmp is local. What happens to local variables? How are registers used? What happens in a subroutine call? CSE 370 - Fall 1999 - Introduction - 8
Now in Assembly RSEG PROG ; first set Stack Pointer START: MOV SP,#STACK-1 CLR flag ; just for show SETB flag ; just for show LOOP1: CLR C ; Clear carry MOV A,il ADD A,P2; ; increment MOV il,A JNC LOOP1 ; loop until carry INC ih ; increment hi byte MOV A,ih ; check if zero JNZ LOOP1 ; XRL P1,#01H SJMP LOOP1 END NAME FLASH PUBLIC il PUBLIC ih PROG SEGMENT CODE ;CONST SEGMENT CODE VAR1 SEGMENT DATA BITVAR SEGMENT BIT STACK SEGMENT IDATA RSEG BITVAR flag: DBIT 1 RSEG VAR1 ih: DS 1 il: DS 1 RSEG STACK DS 10H ; 16 Bytes Stack CSEG AT 0 USING 0 ; Register-Bank 0 ; Execution starts at address 0 on power-up. JMP START CSE 370 - Fall 1999 - Introduction - 9
Compiled C But, here is the optimized Compiled C ?C0001: XRL P1,#01H CLR A MOV i,A MOV i+01H,A ?C0005: MOV R7,i+01H MOV R6,i MOV R5,P2 MOV A,R5 ADD A,i+01H MOV i+01H,A CLR A ADDC A,i MOV i,A CLR C MOV A,R7 SUBB A,i+01H MOV A,R6 SUBB A,i JC ?C0005 SJMP ?C0001 CSE 370 - Fall 1999 - Introduction - 10
I/O Ports • Input ports: Hi Input impedance (like CMOS transistor gate) • Output ports: Hi drive (current source/sink) capability (like CMOS transistor channel) • Bidirectional Ports? • Weak Pullup Approach used in the 8051 • Configuration bits (used in other MCU’s) CSE 370 - Fall 1999 - Introduction - 11
Basic Electronics • Speaker Interface. Design a direct drive circuit for the speakers. How much power are we dissipating in the speaker if we stay within current rating of chip? • How can we get more power to the speaker? • Note to self: Saturation v. Linear operation CSE 370 - Fall 1999 - Introduction - 12
Lab 2 • Design and implement Audio Amplifier interface to 8051. • Simple program (in assembly) that can generate a controllable range of audio frequencies (like lab1, but different range of frequencies and use interrupts instead of busy waiting). • Use interrupts to generate the pulse trains • Any algorithm suggestions? Lets keep it simple!! • Lab write-up • Characteristics of your speaker: min max tone frequency, audibility (loadness) v. frequency, etc. Anything else you notice • Are your drive transistors operating in linear or saturation mode? How can you tell? • Resource Utilization Analysis • % of time in ISR (can you minimize this?) • Worst case stack size CSE 370 - Fall 1999 - Introduction - 13
Embedded Hardware • Microcontrollers • Smallest: PIC 8-Pin (8-bit) PIC 8-pin Microcontroller • Middle: 6805 (8 bit) Example Flash Based 8051 • Many 16-bit DSP Microcontrollers • HW support for MAC, Filter Algorithms • High End: StrongArm (32 bit) Intel • Compare to pentium • External memory • Data Address Multiplexing • Memory Mapped I/O • Device Interfaces • Resistive Sensors (Strain, Temp, Gas, etc.) • Motion sensors (accelerometer) • Valve • Motor (Stepper, DC, Servo)\ • Speaker • LCD Display • LED • Latches • Gas Sensors CSE 370 - Fall 1999 - Introduction - 14