Download

1 / 42
420 likes | 576 Views
Tópicos Especiais em Controle de Conversores Estáticos. Prof. Cassiano Rech cassiano@ieee.org. Sumário. Controle clássico de conversores estáticos Ferramentas de análise e projeto de sistemas de controle Efeitos da realimentação Ações básicas de controle Projeto de compensadores.

E N D
Tópicos Especiais em Controle de Conversores Estáticos Prof. Cassiano Rech cassiano@ieee.org Prof. Cassiano Rech
Sumário • Controle clássico de conversores estáticos • Ferramentas de análise e projeto de sistemas de controle • Efeitos da realimentação • Ações básicas de controle • Projeto de compensadores Prof. Cassiano Rech
Controle clássico de conversores: Introdução Prof. Cassiano Rech Definição das especificações Proposição de um circuito/conversor Modelagem do circuito/conversor Análise orientada ao projeto Verificação prática Análise sob situações críticas Iteração
Controle clássico de conversores: Ferramentas de análise e projeto Prof. Cassiano Rech • Existem diversas ferramentas clássicas para a análise e o projeto de compensadores, destacando-se: • Análise transitória e em regime permanente • Método do lugar das raízes • Diagrama de Bode • Diagrama de Nyquist
Controle clássico de conversores: Ferramentas de análise e projeto Prof. Cassiano Rech • Análise transitória e em regime permanente • A resposta temporal de um sistema de controle é constituída de duas partes: a resposta transitória e a resposta em regime permanente. • Por resposta transitória, entende-se aquela que vai do estado inicial ao estado final. Por resposta em regime permanente, entende-se o comportamento do sinal de saída quando t tende ao infinito. • A análise e o projeto de sistemas de controle no domínio tempo usualmente utiliza sinais de teste, tal como a função degrau.
Controle clássico de conversores: Ferramentas de análise e projeto Teorema do valor final O teorema do valor final estabelece que o comportamento em regime permanente de f(t) é o mesmo comportamento de sF(s) nas proximidades de s = 0. Assim, é possível obter o valor de f(t) em t = . Este teorema é aplicável se e somente se a função f(t) tende para um valor constante quanto t tende ao infinito. Caso o sistema seja instável, ou f(t) seja, por exemplo, uma função senoidal, este teorema não se aplica. Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Especificações de resposta transitória 1) Tempo de subida: é o tempo requerido para que a resposta passe de 0% a 100% do valor final. Para sistemas de segunda ordem o tempo de subida depende tanto do coeficiente de amortecimento quanto da freqüência natural. Quanto maior a freqüência natural e menor o coeficiente de amortecimento, menor será o tempo de subida. Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Especificações de resposta transitória 2) Tempo de acomodação: é o tempo necessário para que a curva de resposta alcance valores em um faixa (usualmente 2% ou 5%) em torno do valor final, permanecendo indefinidamente. Está relacionado com a maior constante de tempo do sistema de controle. (2%) (5%) Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Especificações de resposta transitória 3) Máximo sobre-sinal: é o valor máximo de pico da curva de resposta, medido a partir da unidade. Para um sistema de segunda ordem, seu valor depende somente do coeficiente de amortecimento. Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Prof. Cassiano Rech • Método do lugar das raízes • A característica básica da resposta transitória de um sistema em malha fechada depende essencialmente da localização dos pólos de malha fechada • O lugar das raízes é o lugar das raízes da equação característica do sistema em malha fechada quando um parâmetro específico (normalmente um ganho K) varia de zero a infinito. • O gráfico obtido mostra claramente as contribuições de cada pólo ou zero de malha aberta nas localizações dos pólos de malha fechada.
Controle clássico de conversores: Ferramentas de análise e projeto Considere o sistema em malha fechada mostrado abaixo: C(s) R(s) K G(s) + _ H(s) A função de transferência em malha fechada (FTMF) é: Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Os pólos do sistema em malha fechada são as raízes da equação característica, dada por: Quando K = 0, os pólos do sistema em malha fechada são iguais aos pólos do sistema em malha aberta. Quando K , os pólos do sistema em malha fechada são iguais aos zeros do sistema em malha aberta. Então, variando K de zero até infinito obtém-se o lugar das raízes do sistema em malha fechada, a partir dos pólos e zeros do sistema em malha aberta. Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Regiões de interessedo plano complexo 1 0.8 • Linhas de coeficiente de amortecimento constante são linhas radiais que passam pela origem. No eixo imaginário tem-se que = 0. No eixo real, 1. 0.6 0.4 0.2 Imaginary Axis 0 -0.2 -0.4 -0.6 -0.8 -1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Real Axis Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Regiões de interessedo plano complexo 1 0.8 No semi-plano direito < 0. Logo, o sistema não pode apresentar pólos em malha fechada no semi-plano direito, pois será INSTÁVEL. 0.6 0.4 0.2 Imaginary Axis 0 -0.2 -0.4 -0.6 -0.8 -1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Real Axis Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Regiões de interessedo plano complexo 1 0.8 Os lugares de freqüência natural n constantes são círculos com centro na origem do plano complexo. 0.6 0.4 0.2 Imaginary Axis 0 -0.2 -0.4 -0.6 -0.8 -1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Real Axis Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Regiões de interessedo plano complexo 1 0.8 Os lugares de tempo de acomodação constantes são linhas paralelas ao eixo imaginário. 0.6 0.4 0.2 Imaginary Axis 0 -0.2 -0.4 -0.6 -0.8 -1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 Real Axis Prof. Cassiano Rech
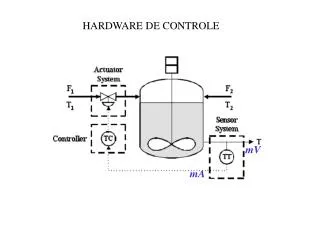
Controle clássico de conversores: Ferramentas de análise e projeto Vin = 100 V L = 250 mH C = 220 mF R = 2 W f= 50 kHz Vo = 50 V Prof. Cassiano Rech • Exemplo • Conversor BUCK em malha fechada com controle proporcional
Controle clássico de conversores: Ferramentas de análise e projeto 4 x 10 2 0.115 0.085 0.056 0.036 0.016 1.75e+004 0.17 1.5 1.25e+004 0.26 1 7.5e+003 0.5 0.5 2.5e+003 Imaginary Axis 0 2.5e+003 -0.5 0.5 7.5e+003 -1 0.26 1.25e+004 -1.5 0.17 1.75e+004 0.115 0.085 0.056 0.036 0.016 -2 -3000 -2500 -2000 -1500 -1000 -500 0 500 1000 Real Axis Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto 100 90 80 70 60 K = 1 Tensão (V) 50 K = 0,1 40 30 K = 0,01 20 10 0 0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01 Tempo (s) Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto Prof. Cassiano Rech • Diagrama de Bode • O termo resposta em freqüência significa a resposta em regime permanente de um sistema a uma entrada senoidal. • Nos métodos de resposta em freqüência, variamos a freqüência do sinal de entrada dentro de um certo intervalo e estudamos a resposta resultante. • A informação que obtemos com base nessa ferramenta é diferente da que é obtida na análise baseada no lugar das raízes. Em muitos projetos práticos de sistemas de controle, ambos os métodos são empregados. • Um diagrama de Bode é constituído de dois gráficos: gráfico do módulo em dB de uma função de transferência e gráfico do ângulo de fase. Ambos são traçados em relação à freqüência em escala logarítmica.
Controle clássico de conversores: Ferramentas de análise e projeto Informações relevantes • Freqüência de cruzamento do ganho (crossoverfrequency): é definida como a freqüência em que o ganho é unitário ou 0 dB. Quanto maior é a freqüência de cruzamento maior será a capacidade do conversor sintetizar sinais de freqüência elevada e sua resposta transitória poderá ser mais rápida. • Margem de fase: é o atraso de fase adicional na freqüência de cruzamento de ganho da função de transferência em malha aberta (FTMA), necessária para que o sistema atinja o limiar de instabilidade. Quanto menor a margem de fase, mais próximo da instabilidade o sistema em malha fechada se encontra. • Margem de ganho: a margem de ganho é o recíproco do módulo na freqüência em que o ângulo é -180º. Para um sistema de fase mínima estável, a margem de ganho indica em quanto pode ser aumentado o ganho antes que o sistema se torne instável. Para um sistema instável, a margem de ganho indica o quanto o ganho deve decrescer para estabilizar o sistema em malha fechada. • Erro estático: quanto maior for o módulo da FTMA na freqüência de interesse, menor será o erro estático. Prof. Cassiano Rech
Controle clássico de conversores: Ferramentas de análise e projeto 60 K = 1 40 K = 0,1 20 Magnitude (dB) 0 K = 0,01 -20 -40 -60 0 -45 Phase (deg) -90 System: ftma Phase Margin (deg): 10.1 -135 Delay Margin (sec): 1.26e-005 At frequency (rad/sec): 1.4e+004 System: ftma Closed Loop Stable? Yes Phase Margin (deg): 44.3 Delay Margin (sec): 0.000138 -180 At frequency (rad/sec): 5.59e+003 2 3 4 System: ftma 5 Closed Loop Stable? Yes 10 10 10 10 Phase Margin (deg): 3.07 Frequency (rad/sec) Delay Margin (sec): 1.25e-006 At frequency (rad/sec): 4.28e+004 Prof. Cassiano Rech Closed Loop Stable? Yes
Controle clássico de conversores: Efeitos da realimentação Os sinais de saída dos conversores estáticos são uma função das fontes de energia, das razões cíclicas dos interruptores e da carga, assim como dos parâmetros do conversor. Então, não podemos esperar que os sinais de saída se manterão ajustados nos valores de interesse para todas as condições de operação, apenas mantendo a razão cíclica fixa. Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação O objetivo da realimentação é construir um circuito que ajuste, quando necessário, a razão cíclica automaticamente para obter os sinais de saída desejados, mesmo com distúrbios nas fontes de energia e na carga, ou com variações paramétricas. Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Para analisar os efeitos da realimentação no desempenho do sistema em malha fechada, iremos utilizar o seguinte diagrama de blocos que representa o modelo de pequenos sinais do sistema em malha fechada. Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Uma vez que existem três sinais de entrada, a tensão de saída pode ser obtida por superposição: Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Função de transferência entre a tensão de saída e a tensão de referência Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Função de transferência entre a tensão de saída e a tensão de entrada Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Função de transferência entre a tensão de saída e a corrente na carga Prof. Cassiano Rech
Controle clássico de conversores: Efeitos da realimentação Relação entre margem de fase e coeficiente de amortecimento em malha fechada • Qual a margem de fase (jm) necessária? • Uma pequena margem de fase resulta em FTMF com reduzido coeficiente de amortecimento. Prof. Cassiano Rech
Controle clássico de conversores: Ações básicas de controle • Proporcional: para um controlador com ação de controle proporcional, a saída do compensador é proporcional ao sinal de erro. • Integral: no controle integral, o sinal de saída do compensador em qualquer instante é a área sob a curva do sinal de erro, até aquele momento. O sinal de controle pode ter um valor não-nulo mesmo quando o sinal de erro for zero. Isso é impossível para o controlador proporcional. Embora a ação de controle integral remova o erro em regime permanente, para entradas do tipo degrau, pode conduzir a uma resposta oscilatória ou até mesmo instável. Prof. Cassiano Rech
Controle clássico de conversores: Ações básicas de controle • Derivativo: A ação de controle derivativo responde a uma taxa de variação do erro e pode produzir uma correção significativa antes que o valor do erro atuante se torne muito elevado. Portanto, o controle derivativo prevê o erro, inicia uma correção antecipada e tende a aumentar a estabilidade do sistema. Embora o controle derivativo não afete diretamente o erro estacionário, ele aumenta o amortecimento do sistema, permitindo o uso de ganho proporcional mais elevado, o que vai resultar em maior precisão em regime permanente. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Especificações • As variáveis controladas devem permanecer dentro de uma faixa especificada mesmo com variações na carga (ganho em malha aberta elevado). • As variáveis controladas devem permanecer dentro de uma faixa especificada mesmo com variações nas fontes de energia (ganho em malha aberta elevado). • O sistema deve responder a distúrbios com uma resposta transitória satisfatória. Tipicamente, o tempo de resposta pode ser diminuído ao aumentar a freqüência de cruzamento do sistema realimentado. • As variáveis controladas usualmente devem apresentar sobre-sinal e oscilações reduzidas. Isto implica que a margem de fase deve ser suficientemente grande. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Compensador em avanço (Proporcional-Derivativo – PD) • Empregado para aumentar a margem de fase. • A freqüência de cruzamento do sistema realimentado também pode ser aumentada, mantendo uma margem de fase adequada. • Um zero é adicionado na FTMA, em uma freqüência fz suficientemente menor que a freqüência de cruzamento fc, tal que a margem de fase de T(s) é aumentada de um valor desejado. • Devido à inclusão do zero, o ganho do compensador aumenta com a freqüência em uma taxa de +20 db/dec. Caso o ganho do compensador seja elevado na freqüência de comutação, os harmônicos produzidos pelas comutações serão amplificados pelo compensador e podem prejudicar a operação do PWM. • Assim, é usual adicionar pólo(s) em freqüência(s) menor(es) que a freqüência de comutação. • Normalmente, a freqüência de cruzamento é limitada em torno de 10% da freqüência de comutação. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores A máxima defasagem introduzida pelo compensador ocorre na freqüência fjmax, dada pela média geométrica das freqüências do zero e do pólo: Para obter o máxima acréscimo na margem de fase, o compensador deve ser projetado para que a freqüência fjmax coincida com a freqüência de cruzamento desejada. Esta especificação é alcançada quando: onde q é o avanço de fase introduzido pelo compensador para atingir a margem de fase desejada. O ganho do compensador deve ser selecionado para selecionar a freqüência de cruzamento desejada. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Compensador em atraso (Proporcional-Integral – PI) • Empregado para aumentar o ganho em malha aberta em baixas freqüências, de tal forma que a saída apresenta melhor regulação em freqüências bem abaixo da freqüência de cruzamento do ganho. • Um pólo é adicionado na origem para aumentar o ganho CC da FTMA. • Com a inclusão do pólo na origem, o erro em regime permanente é nulo para entradas do tipo degrau. Além disso, a função de transferência da saída em relação a um distúrbio é zero para corrente contínua. • Um zero é adicionado em uma freqüência fL suficientemente menor que a freqüência do cruzamento do ganho (usualmente uma década abaixo), de tal forma que a margem de fase não se modifique. • O ganho do compensador deve ser selecionado para selecionar a freqüência de cruzamento desejada. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Compensador Proporcional-Integral-Derivativo – PID) • As vantagens dos compensadores PD e PI podem ser combinadas para obter uma larga banda passante e para eliminar o erro em regime permanente • Em baixas freqüências, o compensador integra o sinal de erro, aumentando o ganho CC da FTMA e melhorando a regulação em baixa freqüência das variáveis a serem controladas. • Em altas freqüências, em torno da freqüência de cruzamento, o compensador introduz um avanço de fase na FTMA, melhorando a margem de fase. Prof. Cassiano Rech
Controle clássico de conversores: Projeto de compensadores Prof. Cassiano Rech
Bibliografia R. W. Erickson, D. Maksimovic, “Fundamentals of Power Electronics”, Second edition. J. G. Kassakian, M. F. Schlecht, G. C. Verghese, “Principles of Power Electronics”. K. Ogata, “Engenharia de Controle Moderno”, 4ª edição. Prof. Cassiano Rech