Download
1 / 29
290 likes | 320 Views
Explore AI models (IP, CSP) for solving Peg Solitaire, utilizing varied move conditions. Combine models to enhance solutions, incorporate channelling constraints, and assess Pagoda functions. Discover board symmetries and independent moves for efficient problem-solving.

E N D
Modelling and SolvingEnglish Peg Solitaire Chris Jefferson, Angela Miguel,Ian Miguel, Armagan Tarim. AI Group Department of Computer Science University of York
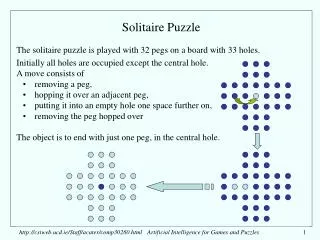
0 1 2 3 4 5 6 0 1 2 3 4 5 6 0 1 2 3 4 5 6 0 1 2 3 4 5 6 Before After English Peg Solitaire • The French variant has a slightly larger board, and is considerably more difficult. Initial: Goal: • Horizontal or vertical moves:
Solitaire: Interesting Features • A challenging search problem. • Highly symmetric. • Symmetries of the board, symmetries of moves. • Planning-style problem. • Not usually tackled directly with constraint satisfaction/integer programming.
Model A: IP • 31 moves required to solve a single-peg reversal. • Exploit this in the modelling. • bState[i,j,t] {0, 1}. • describes the state of the board at time-step t = 0, …, 31. • M[i,j,t,d] {0, 1}. • denotes whether a move was made from location i, j at time-step t. d in {N, S, E, W}.
Model A: IP Move Conditions: `1’ means move made. Connecting board states. Consider all moves affecting a position
Model A: IP One move at a time: Objective function. Minimise:
Model B: CSP • Rather than record the board state, model B records the sequence of moves required: moves[t] • Each transition is assigned a unique number:
0 1 2 3 4 5 6 0 1 Model B: CSP • Problem constraints can be stated on moves[] alone. • Consider transition 0: 2, 0 4, 0 at time-step t. The following must hold at time-step t-1. • There must be pegs at 2, 0 and 3, 0. • There must be a hole at 4, 0. • Ensure by imposing constraints on moves[1..t-1]: Drawback: many such constraints needed. Some of very large size.
Model C = A + B: CSP • Combines models A and B to remove some of the problems of both. • Maintains: bState[i,j,t], moves[t]. • Discards (A): M[], board state connection constraints. • Discards (B): Large arity constraints on moves[]. • Channelling constraints are added to maintain consistency between the two representations. • These connect bState[i,j,t], moves[t], bState[i,j,t+1]. bState[t] bState[t+1] moves[] constrains constrains t
Model C Channelling Constraints Changes(i,j): set of transitions that change the state of i, j • These constraints closely resemble pre- and post-conditions of an AI Planning-style operator. pegIn(i,j): set of transitions that place a peg at i, j pegOut(i,j): set of transitions that remove a peg from i, j
Results: Central Solitaire • Model A (IP): No solution in 12 hours. • Several alternative formulations also failed. • Reason: artificial objective function, hence no tight bounds to exploit. • Model B (CP): Exhausts memory. • Model C (A+B, CP solver): 16 seconds. • So: • Develop model C further. • Apply to other variations of Solitaire.
Pagoda Functions • Used to spot dead-ends early. • Value assigned to each board position such that: • Given positions a, b, c in a horizontal/vertical line: a+b c. • Pagoda value of a board state: • Sum of values at positions where there is a peg. • Monotonically decreasing as moves made: • Pagoda condition: • If pagoda value for an intermediate position is less than that of final position, backtrack. a b c a b c
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Pagoda Functions: Examples • For a single-peg Solitaire reversal at position i, j, want pagoda functions with non-zero entries at i, j. • Otherwise no pruning. • A rotation of one of these three gives a useful pagoda function for every board position:
Board Symmetries • Rotation. • Reflection. • Break rotational symmetry by selecting 1st move: • Reflection symmetry persists. Remove 5,2 3,2:
Board Symmetries • Further into the search are both broken and re-established, depending on the moves made. • Breaking this symmetry is a possible application for SBDS or SBDD.
Symmetries of Independent Moves • Many pairs of moves can be performed in any order without affecting the rest of the solutions. • Two transitions are independent iff: • The set of pegs upon which they operate do not intersect. • Break this symmetry by ordering adjacent entries in moves[]: • independent(moves[i], moves[i+1]) moves[i] moves[i+1] • This problem extends to larger sets of transitions. • If 2 is independent of {3, 1}, can have 2, 3, 1 and 3, 1, 2.
Results: Solitaire Reversals • Compared Model C against state of the art AI planning systems: • Blackbox 4.2, FastForward 2.3, HSP 2.0, and Stan 4. • Experiments on the full set of single-peg reversals. • Although many board positions symmetrical, these positions are distinguished by the transition ordering. • Transitions chosen in ascending order.
1349-- - - 148 - 14 622 - - Solitaire Reversals via AI Planning BBox4.2 FF2.3 HSP2.0 Stan4 25 121 - >1hr 543 - - - 17 1 - >1hr • memory exhausted. 19 0.2 30 - 25 0.7 - 1126 47 1 - - 48 3544 86 - 38 0.6 27 - 14 273 48 >1hr 21 0.6 32 - - - - - 862 >1hr - >1hr 28 0.1 125 - - - 57 - 30 48 - - 620 >1hr 574 >1hr - >1hr - - 19 276 - - 14 0.05 97 >1hr 42 0.15 - - 44 0.05 313 - 49 0.05 60 - 16 1564 - >1hr 19 - 125 - 16 553 - >1hr - - - >1hr 27 1521 - >1hr Note howsymmetricpositionsdiffer. Bbox, FF most successful, achieve a high percentage of coverage. 18 >1hr 298 - - - - - 21 9.8 154 -
Solitaire Reversals via Model C Basic Pair Sym Breaking Pagoda Functions Pagoda+Sym 2903 221.5 2730 54.6 Blank: all >1hr 439 61.1 443 64.9 7 2.7 8 2.7 17 3.5 18 4.9 16 4.1 7.9 5 1700 197 1712 199.9 >1hr 1891.2 >1hr 1036 116 19.1 102 22,3 >1hr 337.8 >1hr 349.6 Less robust. Bad valueordering?Sym breaking, pagodahelp.
Model C + Corner Bias Value Ordering Basic Pair Sym Breaking Pagoda Functions Pagoda+Sym 2903 221.5 2730 54.6 Blank: all >1hr 439 61.1 443 64.9 7 2.7 8 2.7 0.7 17 3.5 18 4.9 16 4.1 7.9 5 1700 197 1712 199.9 1.2 1.3 >1hr 1891.2 >1hr 1036 116 19.1 102 22,3 >1hr 337.8 >1hr 349.6 0.7 Taking symmetry backinto account, can nowcover all but one reversal 1.2 4.6
Symmetric Paths • There are often multiple ways of arriving at the same board state. • Some are due to independent moves. Others are not:
Symmetric Paths • Find all solutions to a given depth. • Group the transition sequences that lead to identical positions. • Insert constraints that allow one representative per group.
Fool’s Solitaire • An optimisation variant. • Reach a position where no further moves are possible in the shortest sequence of moves. • Not easily stated as an AI planning problem. • Shows the flexibility of the CP and IP approaches.
Fool’s Solitaire: IP Model C[i,j,t]=1 iff there is a peg at position i,j with a legal move. • Moves, connection of board states same as model A. New objective function. Minimise:
Fool’s Solitaire: CP Model • Modified version of model C. • An extra transition, deadEnd, is added to the domain of the moves[] variables. • Assigned when no other move is possible. • deadEnd transition is only allowed when no other transitions are possible. • Preconditions based on bState[]. • If deadEnd at moves[t], then also at all following time-steps:
Fool’s Solitaire: Results • CP, reverse instantiation order: 20s • IP, iterative approach: 27s
Conclusions • Basic, and ineffective CP and IP models combined into a superior CP model. • Another instance of the utility of channelling between two complementary models. • Each allows easy statement of different aspects of the problem: • Model A: preconditions on state changes without considering entire move history. • Model B: one move at once, combines 3 state changes into a single token.
Conclusions • Encouraging results versus dedicated AI planning systems. • Lessons learned should generalise to other sequential planning-style problems. • Channelling constraints specify action pre- and post-conditions. • Breaking symmetry of independent actions/paths.
Future Work • Further configurations of English Solitaire. • Other optimisation variants: • Minimise number of draughts-like multiple moves using a single peg. • Proving unsolvability. • Large search space to explore. • Will need improved symmetry breaking. • French Solitaire.