Download
1 / 21
240 likes | 431 Views
Wearable Eye Tracker. Xiaoyong Ye Franz Alexander Van Horenbeke David Abbott. Index. Introduction Background Hardware Software System Design Algorithm Pupil Localization Ellipse Fitting Calibration Homographic Mapping Experimental Results Future Work. Introduction.

E N D
Wearable Eye Tracker Xiaoyong Ye Franz Alexander Van Horenbeke David Abbott
Index • Introduction • Background • Hardware • Software • System Design • Algorithm • PupilLocalization • Ellipse Fitting • Calibration • Homographic Mapping • Experimental Results • FutureWork
Introduction • A completesystemable to tracktheuser’seye and mapthepositionoftheirpupilwiththe area at whichthey are looking at inthesceneinfrontofthem
Background • Wearable Eye-Tracking information • Who has done previous work • What they have used • Recent Methods used with eye tracker
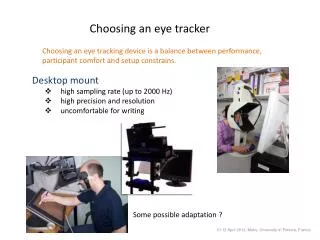
Objectives • Hardware • Wearable • Low-Cost • Light and Confortable • Moveableeye-camera • Software • Real-Time • Accurate
Hardware • Head-MountedGear • TwoCameras: • SceneCamera • EyeCamera
Hardware SceneCamera • Capturesthesceneinfrontoftheuser • Fixed to thehead EyeCamera • Capturestheeye • With 5 DOF withrespect to thehead
System Design Eye Image Scene Image Yes Calibration Done? Pupil Localization No Ellipse Fitting Marker Detection Calculate Homography Ellipse Center Mapping
Pupil Localization • Automatic Threshold (Modified Otsu’s Method) • Image Morphology(Dilation, Erosion) • Connected Components Analysis(Find Pupil) • Pupil Center Estimation
Histogram of an Eye Image Background Pupil Graylevel Threshold
Pupil Localization Threshold Erosion Connect Components Pupil Detection Dilation Fill holes
Ellipse Fitting • 1. Updating the pupil Center • 2. Need 5 points for Fitting Ellipse model • 3. RANSAC to deal with noisy points
EllipseFitting Edge Image • RANSAC method Starburst Algorithm Feature Points RANSAC Ellipse Fitting
Calibration • Relationship between Ellipse center to Scene Image * = Homography Pupil Center Scene Position
Solving for homographies X’= Hx • 8 degrees of freedom in 3 x 3 matrix H, so at least n = 8 pairs of points are sufficient to determine it • Set up a system of linear equations: Ah = 0 • where vector of unknowns h = [a,b,c,d,e,f,g,h]T • Need at least 8 eqs, but the more the better… • Solve for h. solve using least-squares
calibration method 1. Look at Scene Marker and Press corresponding number on keyboard, 2. Each marker press 2 to 3 times. 3. Randomly select 8 pairs of points to calculate Homography.(Repeatly) 3. Choose the best Homography matrix.
Mapping (x2, y2) (x1, y1)
ExperimentalResults • Frame rate 25/second • Accurate Pupil Ellipse • Mapping error is low( 13 pixels in 640*480 image)
Demo • Link • http://www.youtube.com/watch?v=lBXLpsXBGOA&context=C25ea4ADOEgsToPDskIo6A6rLXR8eySvaEf82q6h
FutureWork • Hardware • Lighter cameras • Scene camera position • Software • Use corneal refletion • Try different mapping techniques