Download
1 / 34
340 likes | 510 Views
Decomposed fuzzy proporcional-integral-derivative controllers. Autor: Marjan Golob Apresentador: Ebrahim Samer El’youssef. Conteúdo. Descrição do controlador Outros controladores Sistema de suspensão magnética Parâmetros do controlador Experimentos e resultados. Descrição do controlador.

E N D
Decomposed fuzzy proporcional-integral-derivative controllers Autor: Marjan Golob Apresentador: Ebrahim Samer El’youssef
Conteúdo • Descrição do controlador • Outros controladores • Sistema de suspensão magnética • Parâmetros do controlador • Experimentos e resultados
Descrição do controlador • Controlador PID nebuloso • Aplicável a plantas difíceis de se modelar; • Utiliza heurística; • Não existem procedimentos de projeto; • Quanto maior o número de variáveis nebulosas mais complicada solução.
Descrição do controlador • Controlador PID nebuloso decomposto • Possui três entradas, uma saída e um base de regra dividida em três uma para cada entrada. • Possui 9 regras ao total, assumindo que cada base regra tenha três regras, diferindo do PID nebuloso que possui 27 regras – base de regras de três dimensões.
Descrição do controlador • O projeto controlador PID nebuloso é baseado no PID discreto, logo dependera: • Erro • Mudança do erro • Integral do erro • Lei de controle
Descrição do controlador • Base de regras controlador PID nebuloso • E’,DE’,IE’ e U’ são variáveis nebulosas • E(i), DE(i), IE(i) e U(i) são os iézimos conjuntos nebulosos
Descrição do controlador • Relação nebulosa R da base de regras • nova saída controlador nebuloso dadas as correntes entradas nebulosa • Com a decomposição
Descrição do controlador • Assumindo: • Tem-se que:
Descrição do controlador • Assumindo: • Tem-se que:
Descrição do controlador • Ou ainda:
Outros controladores nebulosos • PD + I FLC
Outros controladores nebulosos • PI FLC + controlador convencional D
Outros controladores nebulosos • P FLC + controlador convencional ID
Outros controladores nebulosos • PD FLC + PI FLC
Suspensão Magnética • Sistema
Suspensão Magnética • Esquema implementado
Suspensão Magnética • Parâmetros
Parâmetros do controlador • Método de inferência Mandami • inferência nebulosa com o operador minimum • a composição com o operador maximum • Método de desfuzzificação é do centro de gravidade • Função de associação de entrada
Parâmetros do controlador • Função de associação de saída (singleton) • Base de regra para parte proporcional do controlador PID nebuloso
Parâmetros do controlador • Base de regra de duas dimensões
Funcionamento • Encontrar os níveis de disparo de cada regra; τi
Funcionamento • Encontrar a saída de cada regra; UE
Funcionamento • Combinação dos três conjuntos fuzzy UE gerados; • Defuzzificação (centro de gravidade)
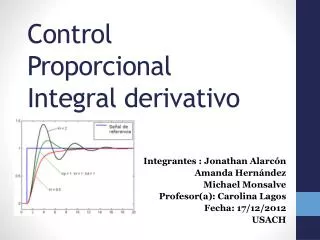
Experimentos e Resultados • Os experimentos foram realizados em tempo real • Primeiro experimento - mudança de referencia (6-8 e 14-16 mm)
Experimentos e Resultados • PD + I FLC
Experimentos e Resultados • PID FLC
Experimentos e Resultados • PD + PI FLC
Experimentos e Resultados • P FLC + ID
Experimentos e Resultados • PI FLC + D
Experimentos e Resultados • Índices de performance
Experimentos e Resultados • Segundo experimento – perturbação de carga (2V (100-900)) • Controladores nebulosos
Experimentos e Resultados • Controladores nebulosos híbridos
Experimentos e Resultados • Índice de performance
Experimentos e Resultados • Analisando os dados das simulações pode-se dizer que dada aceitação o controlador nebuloso decomposto proposto é uma boa solução devido suas características de possuir bases de regras mais simples.