Download
1 / 20
200 likes | 258 Views
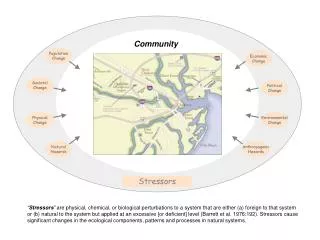
Dealing with uncertainty in international migration predictions: From probabilistic forecasting to decision analysis. Jakub Bijak Division of Social Statistics and Centre for Population Change University of Southampton.

E N D
Dealing with uncertainty in international migration predictions: From probabilistic forecasting to decision analysis Jakub Bijak Division of Social Statistics and Centre for Population Change University of Southampton Joint Eurostat / UNECE Work Session on Demographic Projections Lisbon, 28–30 April 2010
Contents • Uncertainty in international migration studies • Shift of perspective in demographic forecasting • Further step: decision support • Bayesian decision analysis • Stylised migration example • Limitations of migration predictions • Outlook for the future
Uncertain International Migration • Uncertainty of measurement • Incoherent definitions, lack of harmonisation • Incomplete measurement of events/transitions • Uncertainty of determinants • Lack of a good, comprehensive migration theory • Determinants and their impact on migration also largely uncertain (economy? individual decisions?) • Uncertainty of the future (immanent) • Migration processes very difficult to predict, likely exhibiting non-stationary features
Uncertain International Migration • All these uncertainties cumulate in migration (and thus also population) forecasts • One of key assumptions concerns stationarity • Implications: • Computationally convenient, uncertainty “under control” • The effects of shocks, such as policy interventions, are expected to fade out over time • But: “too orderly” forecasts that tell more about current politics and society than migration [Pijpers, 2008] • “Too precise” predictions very likely to fail
Perspective Shift in Forecasting • Point forecasts / projections • Almost certainly will NOT come true • Variant forecasts / projections • What probabilities are associated with the scenarios? • Probabilistic forecasts • How to quantify the uncertainty? Frequentist vs. Bayesian approaches • Which trajectory should the users choose? No universal solution
Perspective Shift in Forecasting • A Bayesian example of migration forecasts Immigration to Portugal: 50%, 80% and 90% predictive intervals Which trajectories to choose for the decision making? Source: Bijak and Wiśniowski (2010) JRSS A, 174(4), forthcoming
Bayesian Decision Analysis • Bayesian decision analysis applies to various types of problems, such as: • Estimation and measurement • Forecasting • Choice of an optimal decision depends on: • The underlying probability distribution • The decision setting, approximated by the cost of under- or overestimation or prediction
Bayesian Optimal Decisions • Rule: Choose a decision d that minimises the expected loss under a given probability distribution of states of the world w, p(w) • Expected loss, under loss functionL(w,d): ρ(p, d) = • Solution (if exists): d* = arg min{d} { ρ(p, d) } [DeGroot, 1970]
Loss Functions • Loss functionL(w,d) measures decision maker’s cost of making a decision d, when the true state of the world is w [DeGroot, 1970] • Symmetric functions • L(w, d) = a (w – d)2 ⇒ Solution: mean • L(w, d) = a |w – d| ⇒ Solution: median • L(w, d) = a ∙ 1w≠d ⇒ Solution: mode • Asymmetric functions, more likely in real-world applications [Lawrence et al., 2006]
Loss Functions: Examples • Asymmetric loss functions [e.g. Zellner, 1986] • LinLin (linear-linear): • L(w, d) = a (w – d) ∙ 1w ≤ d + b (d – w) ∙ 1w > d • Solution: quantile of rank b/(a+b) • LinEx (linear-exponential): • L(w, d) = b {exp[a (w – d)] – a (w – d) – 1} • Solution: (–1/a) ln{Ew[exp(–aw)]} • Related to the moment-generating function
Loss Functions: Examples Source: own elaboration
Example: Stylised forecast • Assume that a forecast of log(immigration) was prepared using a simple Bayesian linear model with Normal errors • For precision (inverse variance) of the error term, assume a priori Gamma distribution • For other parameters, assume a priori Normal distributions (standard assumptions) • Predictive distribution for log(immigration) is Student’s t, and for immigration: log-t
Example: Loss functions • Problem: log-t distribution is heavy tailed and does not have positive moments • Plausible loss functions: • LinLin (solutions: quantiles) • Point (solution: mode) • Implausible loss functions: • Quadratic (mean does not exist) • LinEx (moment generating function ditto) ☑ ☒
Example: Decisions Solutions: 54,071 59,874 51,620 69,448 Source: own elaboration
Limitations of forecasting • [See also: Taleb, 2009] Common-sense strategies
Limitations of forecasting • [See also: Taleb, 2009] Migration predictions
Alternatives and extensions • Alternative: minimax rule • Decision minimising the maximum loss • But, how do we know what is the maximum? • Besides, very pessimistic… • Bayesian alternative: conditional G-minimax • Minimax rule, but constrained to a certain class G of prior distributions • Extensions: stable decisions, which minimise the oscillations of risk over G[Męczasrki 1998]
Limitations and caveats • Forecasts cannot be too precise to avoid the “illusion of control” [Makridakis & Taleb, 2009] • E.g. the 2003 predictions of A8 immigration into the UK, off by over an order of magnitude • Plausible forecast horizon vs stationarity: • Migration: 5 to 10 years? [cf. Holzer, 1959] • Population: up to 20 years? [cf. Keyfitz, 1982] • Longer periods: back to scenarios? [Keilman, 1990]
The Future • Research on complexity and predictability of migration and population processes • Towards more interactive forecasting? • Forecast users → provide the decision setting • Domain experts → provide information a priori • Forecasters → combine information to provide forecasts and user-specific decision support • Common framework: Bayesian approach?
Thank you! Research prepared within the Centre for Population Change (CPC) funded by the ESRC Grant number RES-625-28-0001. All opinions are those of the author only.