Download
1 / 28
300 likes | 677 Views
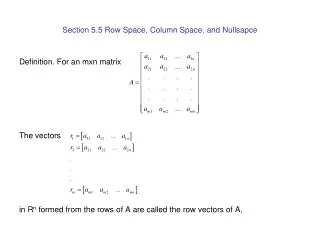
5.5 Row Space, Column Space, and Nullspace. Row Space, Column Space, and Nullspace. Definition: For an m x n matrix the vectors in R n formed from the rows of A are called the row vectors of A, and the vectors in R m formed from the columns of A are called the column vectors of A.

E N D
Row Space, Column Space, and Nullspace • Definition: For an mxn matrix the vectors in Rn formed from the rows of A are called the row vectors of A, and the vectors in Rm formed from the columns of A are called the column vectors of A
Row Space, Column Space, and Nullspace • Definition: • If A is an mxn matrix, then the subspace of Rn spanned by the row vectors of A is called the row space of A, • and the subspace of Rm spanned by the column vectors is called the column space of A. • The solution space of the homogeneous system of equations Ax=0, which is a subspace of Rn, is called the nullspace of A. • Theorem 5.5.1: A system of linar equations Ax=b is consistent iff b is in the column space of A
example Show that b in column space of A! The solution by G.E. X1 = 2, X2 = -1, X3 = 3, the system is consistent, b is in the column space of A
Row Space, Column Space, and Nullspace • Theorem 5.5.2: If x0 denotes any single solution of a consistent linear system Ax=b, and if v1,v2,...,vk form a basis for the nullspace of A, that is, the solution space of the homogeneous system Ax=0, then every solution of Ax=b can be expressed in the form and, conversely, for all choices of scalars c1,c2,...,ck, the vector x in this formula is a solution of Ax=b.
General and Particular Solutions • Terminology: • Vector x0 is called a particularly solution of Ax=b. • The expression x0+c1v1+c2v2+...+ckvk is called the general solution of Ax=b. • The expression c1v1+c2v2+...+ckvk is called the general solution of Ax=0.
Bases for Row Spaces, Column Spaces, and Nullspaces • Theorem 5.5.3: Elementary row operations do not change the nullspace of a matrix • Theorem 5.5.4: Elementary row operations do not change the row space of a matrix • Theorem 5.5.5: If A and B are row equivalent matrices, then: • A given set of column vectors of A is linearly independent iff the corresponding column vectors of B are linearly independent. • A given set of column vectors of A forms a basis for the column space of A iff the corresponding column vectors of B form a basis for the column space of B.
Bases for Row Spaces, Column Spaces, and Nullspaces • Theorem: If a matrix R is in row-echelon form, then the row vectors with the leading 1’s (i.e., the nonzero row vectors) form a basis for the row space of R, and the column vectors with the leading 1’s of the row vectors form a basis for the column space of R. • Example: [Bases for Row and Column Spaces] The matrix R is in row-echelon form, while the vectors r form a basis for the row space of R
Bases for Row Spaces, Column Spaces, and Nullspaces and the vectors form a basis for the column space of R • Example: [Bases for Row and Column Spaces] Find bases for the row and column spaces of
Bases for Row Spaces, Column Spaces, and Nullspaces The basis vectors are The first, third, and fifth columns of R contain the leading 1’s of the row vectors that form a basis for the column space of R. Thus the corresponding column vectors of A, form a basis for the column space of A
Bases for Row Spaces, Column Spaces, and Nullspaces • Example: [Basis and Linear Combinations] • Find a subset of the vectors v1=(1,-2,0,3), v2=(2,-5,-3,6), v3=(0,1,3,0), v4=(2,-1,4,-7), v5=(5,-8,1,2) that forms a basis for the space spanned by these vectors. • Express each vector not in the basis as a linear combination of the basis vector Solution:
Bases for Row Spaces, Column Spaces, and Nullspaces Basis for the column space of matrix vectors w is {w1,w2,w4} and consequently basis for the column space of matrix vectors v is {v1,v2,v4}. • Expressing w3 and w5 as linear combinations of the basis vectors w1,w2, and w4 (dependency equations). w3 = 2w1 - w2 w5 = w1 + w2 + w4 The corresponding relationships are v3 = 2v1 – v2 v5 = v1 + v2 + v4
Bases for Row Spaces, Column Spaces, and Nullspaces • Given a set of vectors S={v1,v2,...,vk) in Rn, the following procedure produces a subset of these vectors that forms a basis for span(S) and expresses those vectors of S that are not in the basis as linear combinations of the basis vectors. Step 1. Form the matrix A having v1,v2,...,vk as its column vectors. Step 2. Reduce the matrix A to its reduced row-echelon form R, and let w1,w2,...,wk be the column vectors of R. Step 3. Identify the columns that contain the leading 1’s in R. The corresponding column vectors of A are the basis vectors for span(S). Step 4. Express each column vector of R that does not contain a leading 1 as a linear combination of preceding column vectors that do contain leading 1’s.
Four Fundamental Matrix Spaces • Fundamental matrix spaces: Row space of A, Column space of A Nullspace of A, Nullspace of AT • Relationships between the dimensions of these four vector spaces.
Row and Column Spaces have Equal Dimensions • Theorem 5.6.1: If A is any matrix, then the row space and column space of A have the same dimension. • The common dimension of the row space and column space of a matrix A is called the rank of A and is denoted by rank(A); the dimension of the nullspace of A is called the nullity of A and is denoted by nullity(A).
Row and Column Spaces have Equal Dimensions • Example: [Rank and Nullity of a 4x6 Matrix] Find the rank and nullity of the matrix Solution: The reduced row-echeclon form of A is rank(A) = 2 and the corresponding system will be
Row and Column Spaces Have Equal Dimensions The general solution of the system is
Row and Column Spaces Have Equal Dimensions Nullity(A)=4
Row and Column Spaces Have Equal Dimensions • Theorem 5.6.2: If A is any matrix, then rank(A) = rank(AT). • Theorem 5.6.3: [Dimension Theorem for Matrices] If A is a matrix with n columns, then rank(A) + nullity(A) = n • Theorem 5.6.4: If A is an mxn matrix, then: • Rank(A) = the number of leading variables in the solution of Ax = 0. • Nullity(A) = the number of parameters in the general solution of Ax = 0.
Row and Column Spaces Have Equal Dimensions • A is an mxn matrix of rank r
Maximum Value for Rank • A is an mxn matrix: rank(A) ≤ min(m,n) where min(m,n) denotes the smaller of the numbers m and n if m≠n or their common value if m=n.
Linear Systems of m Equations in n Unknowns • Theorem 5.6.5: [The Consistency Theorem] If Ax = b is a linear system of m equations in n unknowns, then the following are equivalent. • Ax = b is consistent • b is in the column space of A. • The coefficient matrix A and the augmented matrix [A|b] have the same rank.
Linear Systems of m Equations in n Unknowns • Theorem: If Ax = b is a linear system of m equations in n unknowns, then the following are equivalent. • Ax = b is consistent for every mx1 matrix b. • The column vectors of A span Rm. • Rank(A) = m • A linear system with more equations than unknowns is called an overdetermined linear system. The system cannot be consistent for every possible b.
Linear Systems of m Equations in n Unknowns • Example: [Overdetermined System] The system is consistent iff b1, b2, b3, b4, and b5 satisfy the conditions
Linear Systems of m Equations in n Unknowns • Theorem 5.6.7: If Ax=b is a consistent linear system of m equations in n unknowns, and if A has rank r, then the general solution of the system contains n-r parameters. • Theorem 5.6.8: If A is an mxn matrix, then the following are equivalent. • Ax=0 has only the trivial solution. • The column vectors of A are linearly independent. • Ax=b has at most one solution (none or one) for every mx1 matrix b. • A linear system with more unknowns than equations is called an underdetermined linear system. • Underdetermined linear system is consistent if its solution has at least one parameter → has infinitely many solution.
Summary • Theorem 5.6.9: [Equivalent Statements] If A is an nxn matrix, and if TA:Rn→Rn is multiplication by A, then the following are equivalent. • A is invertible • Ax=0 has only the trivial solution • The reduced row-echelon form of A is In. • A is expressible as a product of elementary matrices. • Ax=b is consistent for every nx1 matrix b • Ax=b has exactly one solution for every nx1 matrix b • Det(A)≠0
Summary • The range of TA is Rn • TA is one-to-one • The column vectors of A are linearly independent • The row vectors of A are linearly independent • The column vectors of A span Rn • The row vectors of A span Rn • The column vectors of A form a basis for Rn • The row vectors of A form a basis for Rn • A has rank n • A has nullity 0