Download
1 / 9
110 likes | 320 Views
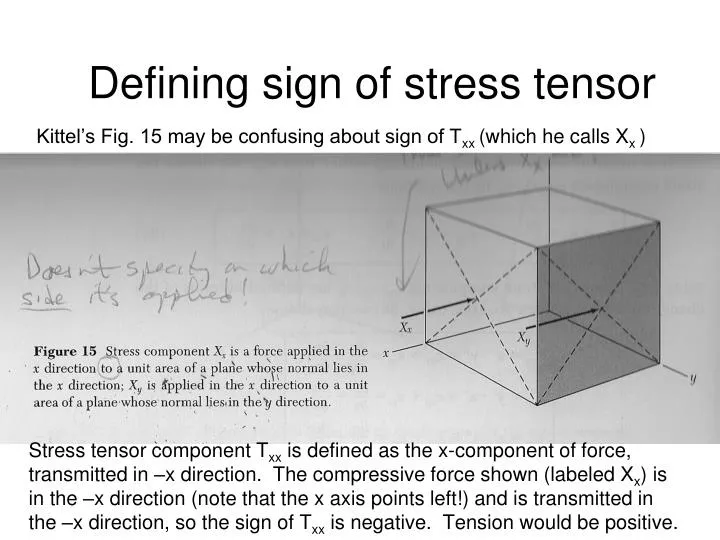
Defining sign of stress tensor. Kittel’s Fig. 15 may be confusing about sign of T xx (which he calls X x ).

E N D
Defining sign of stress tensor Kittel’s Fig. 15 may be confusing about sign of Txx (which he calls Xx ) Stress tensor component Txx is defined as the x-component of force, transmitted in –x direction. The compressive force shown (labeled Xx) is in the –x direction (note that the x axis points left!) and is transmitted in the –x direction, so the sign ofTxx is negative. Tension would be positive.
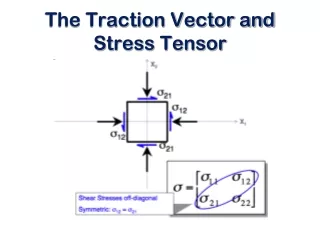
Lecture 21 Oct. 8, 2010 PH 481/581 Elasticity (Chapter 3) Recall Young’s modulus Y: F F ←L+DL → ← L → Stress = elasticity constant x strain In general, stress and strain are 3x3 matrices, so the most general relation would be Where M has 4 indices (3x3x3x3 =81 elements) Fortunately, not all elements of T and e are independent: these matrices are symmetric: – only 6 of 9 elements are independent. Replace 3x3 matrix by a 6-component column vector:
Elasticity (continued) T is symmetric matrix – only 6 of 9 elements are independent. Replace 3x3 matrix By 6-element column vector: How about strain tensor? Again replace the 3x3 symmetric matrix By a 6-element column vector: Note factor of 2, only in off-diagonal elements. (Later, makes energy formula simpler.) We will use m and n to represent the composite indices 1..6, and a and b to represent x,y,z.
Elasticity (continued) Now we can write the most general linear relationship between stress and strain as a matrix equation e = S T: Recalling that the 1..6 indices are short for (xx),...(xy), this is
Elasticity (continued) We call S (in e = S T) the compliance matrix. We denote the inverse matrix (“stiffness matrix”) by C = S-1, so that T = C e. In a system with no symmetry, all 36 components of C and S are independent. In the case of cubic symmetry, the axes are equivalent, so that S(xx)(xx) = S(yy)(yy) , i.e. S11 = S22. Similarly, S(xy)(xy) = S(yz)(yz) , so S66 = S44 . Also, S13 = S12 -- all the off-diagonal elements in the upper left 3x3 matrix are equal. Also, anything like S(xx)(xy) that has a single y index must vanish due to the y↔ -y symmetry. This leads to Cubic symmetry only The stiffness matrix C has the same form -- a cubic material has 3 independent stiffness coefficients C11, C12, and C44.
Elasticity (continued) F F Important special case: uniaxial stress, Txx >0, other Tab = 0. Then ←L+DL → ← L → if cubic symmetry This experiment defines Young’s modulus Y = (F/A)/(DL/L) = Txx / exx = 1/S11, as well as Poisson’s ratio P = - eyy / exx = -S12 /S11. Note that eyy < 0 when stress is applied along x only, so S12 < 0. Elastic Energy: energy/volume U is (Cmn can be chosen to be symmetric)
Lecture 23 Oct. 13, 2010 PH 481/581 Elastic Waves (Chapter 3) Write equation of motion for a volume element from position r, now at displaced position r + R(t): F R becomes F r But displacement R is related to the strain tensor, which is related to the stress tensor T. Expressing everything in terms of R, Origin Like a wave equation. So F=ma becomes
Elastic Waves (continued) Derived a wave equation for displacement R: Writing part of the a=x component explicitly, This is Eq. (57a) in Kittel. Solutions: try a plane wave so Try k = (K, 0, 0) & R along x: So and the wave speed is
Lecture 24 Oct. 13, 2010 PH 481/581 Elastic Waves (Chapter 3) Review: becomes in terms of displacement R – wave equation. Insert a plane wave Try k along x, i.e. (100) & R along 100: rv2 = C11 & k along (100) & R along 010: rv2 = C44 & k along (110) & R along 110: rv2 = ½(C11 + C12 + 2C44) & k along (110) & R along 001: rv2 = C44 & k along (110) & R along (1-10): rv2 = ½(C11 - C12) Condition for isotropy: C11 - C12 = 2C44 Kittel gives table – W is close to isotropicLamé constants: T = 2me + l tr e1; derive C11=2m+l, C12=l, C44=m