Download
1 / 12
120 likes | 257 Views
Planning the Shortest Safe Path amidst Unpredictably Moving Obstacles. Jur van den Berg, Mark Overmars Universiteit Utrecht The Netherlands. Planning amidst Moving Obstacles. Motions not known beforehand Future trajectories estimated (extrapolating velocity)

E N D
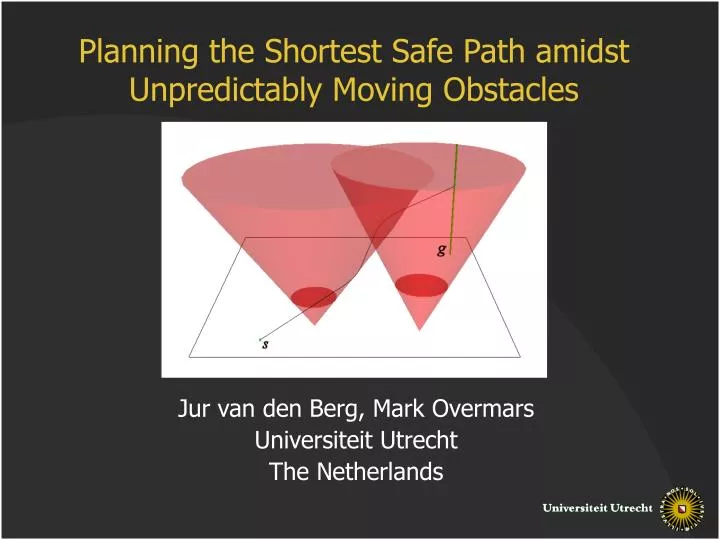
Planning the Shortest Safe Path amidst Unpredictably Moving Obstacles Jur van den Berg, Mark Overmars Universiteit Utrecht The Netherlands
Planning amidst Moving Obstacles • Motions not known beforehand • Future trajectories estimated (extrapolating velocity) • Replanning when obstacle velocities change • Usually fixed amount of time reserved for planning (τ) • Query at time t: initial world state at time t + τ • Problems: • Predicted situation of world at time t + τ may be wrong • Path covered between time t and time t + τ is not safe
Model • Motion planning amidst unpredictably moving obstacles • Moving obstacles have maximal velocity v • Robot has maximal velocity V > v • Obstacles and robot are discs in the plane (with varying radii) • Key observation: regions in space possibly not collision-free are discs growing over time • Desired result: a guaranteedly collision-free path between s and g
Problem Description • Given n discs with positions p1, …, pn R2, (initial) radii r1, …, rn R+ and growth rates v1, …, vn R+ • Given a maximal velocity V, start position s and goal position g • Compute a shortest path avoiding the growing discs • Movie t = 0 t = 1 t = 2
Problem Inventory • Shortest paths amidst (fixed) discs in the plane: O(n2 log n) • Growing discs three-dimensional problem • Each growing disc transforms into a cone • For discs with equal growth rates: O(n3 log n)
Properties of Shortest Paths • Maximal velocity • Straight-line and ‘contact’ motions • Logarithmic spiralsr(t) = tθ(t) = ±K log t + θ0 • Smooth • Straight-line segments are bi-tangent to cones
Global Approach • Tree of shortest paths • Prioritized breadth-first search • Problem: algorithm may run forever • Need to prune tree
Departure Curves • Straight-line segments are bitangent • Tangency points at source cone form continuous curves on surface • Curves have velocity < V (same growth rate) • Curves segmented into collision-free intervals • Thus: one path per departure curve interval
Analysis • On each cone: O(n) departure curves O(n2) departure curve intervals • n cones O(n3) departure curve intervals • Each interval: two outgoing edges • O(n3) edges in total. • Running time Dijkstra’s algorithm: O(N log N + E) • Thus O(n3 log n) running time • Extra work per edge: O(log n) (using arrangements)
Discs with Different Growth Rates • Heuristic pruning scheme • Collision-free vertical lines on surface of cones act as “vertices”
Results • Very fast • Interactive application
Planning amidst Moving Obstacles • Potential obstacle regions grow fast over time • Repeated replanning based on new sensor information • All possible obstacle motions incorporated in model • Planned path guaranteed to be collision-free • Planning very fast • Problem: path to goal often does not exist