Download
1 / 35
350 likes | 518 Views
Device level vacuum packaged micromachined infrared detectors on flexible substrates. Aamer Mahmood Donald P. Butler Zeynep Çelik-Butler Microsensors Laboratory Department of Electrical Engineering University of Texas at Arlington, Arlington, TX 76019. Outline. Microbolometers

E N D
Device level vacuum packaged micromachined infrared detectors on flexible substrates Aamer Mahmood Donald P. Butler Zeynep Çelik-Butler Microsensors Laboratory Department of Electrical Engineering University of Texas at Arlington, Arlington, TX 76019
Outline • Microbolometers • Flexible substrates • Device level vacuum packaging • Design and fabrication • Characterization • Future work
Bolometers • Bolometers are thermal detectors • YBCO is used as the detector material • Change in temperature induces a change in the detector resistance η = absorptivity, β= TCR, = angular frequency of incident radiation, τ = detector thermal time constant, ΔΦ = the magnitude of the incident flux fluctuation, Geff = thermal conductivity
Sensors on flexible substrates • PI 5878G (liquid Kapton) is used as the flexible substrate • Sensor Arrays on flexible substrates (Smart skins) • Infrared sensors • Pressure/Tactile Sensors • Flow sensors • Humidity sensors • Velocity sensors • Accelerometers • Advantages of flexible substrate micro sensors • Low cost • Lightweight • Conformable to non planar surfaces • High degree of redundancy • Vacuum packaging brings the best out of many MEMS devices
Microbolometer fabrication Trench Geometry (Not to scale)
Section of vacuum cavity before micromachining Al2O3 Sacrificial PI2737 mesa Nitride Al mirror Sacrificial PI2610 Nitride
Design considerations • Transmission through optical window • Structural integrity of vacuum element • Lateral dimensions • Cavity resonant wavelength • Axial dimensions
Thermal analysis Gth ≈ 5x10-6 W/K (Vacuum) ≈10-4 W/K (air)
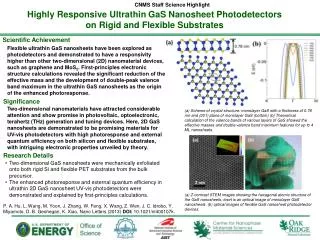
Fabrication of encapsulated devices Fully micromachined device SEM graph of an unsealed micromachined device Partially micromachined device
Fabrication of encapsulated devices Vacuum cavity SEM graph of sealed device Sealed device SEM graph of cross section of vacuum cavity
VI curve Gth=3.36x10-6 W/K
Temperature Coefficient of Resistance (TCR) R(300K)=53.4 MΩ TCR(300K)=-3.4%/K
Current Responsivity (RI) Current Responsivity (RI) =Output current/Input power RI=6.13x10-5 A/W @ 5Hz
Detectivity (D*) Detectivity = D* = Area normalized signal to noise ratio D* = 1.76x105 cm-Hz1/2/W
Conclusion • Device level vacuum encapsulated microbolometers on flexible substrates have been fabricated • Theoretical thermal conductivity in vacuum is 5x10-6 W/K • Measured thermal conductivity is 3.36x10-6 W/K (Intact Vacuum cavity) • Measured room temperature TCR is -3.4%/K, resistance is 53.4MΩ • Measured RI is 6.13x10-5 A/W, D*=1.76x105cm-Hz1/2/W
Future work • Incorporating more sensors in the smart skins e.g. pressure/tactile sensors, flow sensors, accelerometers • Cavity design to improve/tune optical response • True integrated flexible system
This work is supported by the National Science Foundation • ECS-025612 The End