Download
1 / 11
110 likes | 145 Views
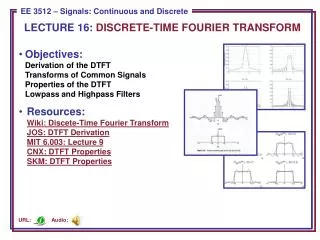
Learn about Z-Transforms, Poles, Zeros, Stability, and Frequency Spectrum in digital signal processing. Explore the concepts of causality, stability, and system analysis with practical examples and explanations.

E N D
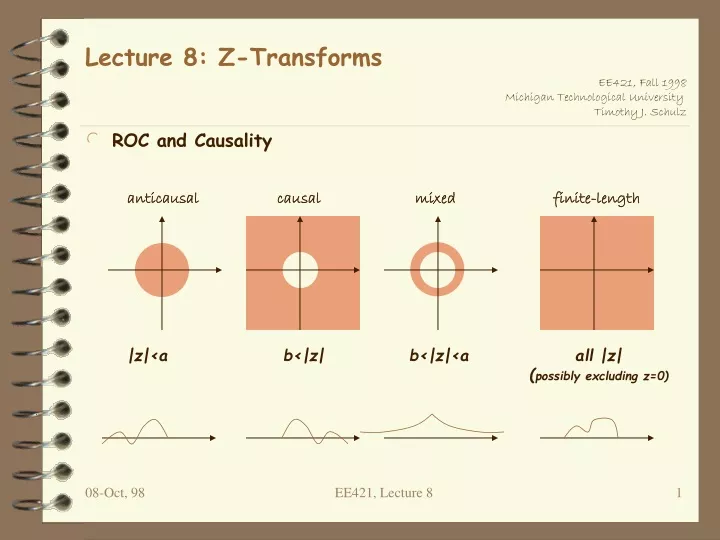
Lecture 8: Z-Transforms • ROC and Causality anticausal causal mixed finite-length |z|<a b<|z| b<|z|<a all |z| (possibly excluding z=0) EE421, Lecture 8
Z-Transform and Stability • The ROC for a stable sequence must contain the unit-circle! stable, anticausal unstable, causal stable, mixed stable, finite-length |z|<a b<|z| b<|z|<a all |z| (possibly excluding z=0) EE421, Lecture 8
Poles and Zeros • A special class of Z-transforms can be expressed as a ratio of polynomials in z:{pk} are the poles; {ck} are the zeros. • All systems that are described by difference equations (all digital filters) have transfer functions that can be expressed this way. EE421, Lecture 8
Poles and Zeros • Example: x(n) = (0.8)nu(n) + (1.25)nu(n) |z| > 0.8 |z| > 1.25 x x O unstable system EE421, Lecture 8
Poles and Zeros • Example: x(n) = (0.8)nu(n) - (1.25)nu(-n-1) |z| > 0.8 |z| < 1.25 x x O stable system EE421, Lecture 8
Stability and Causality • A system (or sequence) that is both stable and causal must have all its transfer function (or z-transform) poles inside the unit circle! x x x x x x x x cannot be stable and causal can be stable and causal EE421, Lecture 8
Frequency Spectrum • Discrete-time Fourier Transform • System Frequency Response EE421, Lecture 8
Frequency Spectrum • Frequency spectrum is the z-transform evaluated on the unit circle! w = p/2 medium frequencies w = 3p/4 w = p/4 low frequencies high frequencies w = p w = 0 w = -p/4 w = -3p/4 w = -p/2 medium frequencies EE421, Lecture 8
Frequency Spectrum and the Z-Transform • Spectrum magnitude at a particular frequency is the ratio of the product of the distances to the zeros over the product of the distances to the poles. product of distances to zeros product of distances to poles EE421, Lecture 8
Frequency Spectrum and the Z-Transform • What does this mean? • poles “pull” the spectrum up • zeros “push” the spectrum down EE421, Lecture 8
Moving Average Filter • Example (moving average filter): y(n) = (4/7)x(n) + (2/7)x(n-1) + (1/7)x(n-2)h(n) = (4/7)d(n) + (2/7)d(n-1) + (1/7)d(n-2) zeros poles at z = 0 (two of them) EE421, Lecture 8