Download
1 / 14
140 likes | 147 Views
This project aims to design an end effector for a robotic arm that can be used to guide needle insertion during CT scans, providing real-time guidance and improving success rates. The system reduces radiation exposure, increases precision, and eliminates direct contact with the patient.

E N D
Robotic Needle End Effector for Integration with CT Scan Team Members: David Sun Xuan Truong Chris Willingham Advisor: Dr. Bradford Wood
Advantages Real time Faster Guidance for interventional procedures Better success rate Disadvantages Radiation - 2 mGy/procedure - annual limit 500 CT Fluoroscopy
Robotic System • Radiation exposure reduced • Greater precision and accuracy • Lack tremor • No direct contact with patient
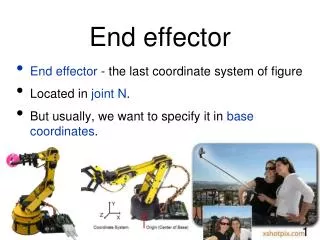
Objectives • Design an end-effector • Degrees of freedom • Needle driver • Different needle gauges • Rapid unlock • Relocation
Problems • Primary—respiratory movement • Variable grips • Multiple needle attachment at a common interface • Degrees of freedom • Rapid release of the needle driver • Visualization of the insertion point • Electrical interface of the needle driver with the robotic arm
Possible Solutions • Potential for a feedback control system • Modification of current heart stabilizers • Variable grip driver • Design of a single interface • CAD interface • Pneumatic gripper from Kawasaki • Infrared camera in close proximity to needle driver
Market Potential • Improve surgical procedures (article from Computer Aided Surgery) • Increased cost efficiency • Safety concerns addressed by prototype construction & testing • Effectiveness of the system improved by building on current design • Rapidly advancing • An end arm effector that addresses all these concerns is likely to be effectively marketed as the field advances
Progress Made • Discussed goals with Dr. Wood • Completed NCIIA proposal • Obtained information & images • Contacted Dr. Lee Gorden & Dr. Ron Price
Current Status • Researching and brainstorming • Investigating potential materials • Reviewing surgical robots • Learning and Installing Solidedge • Scheduling, requirement definition, work breakdown assignment
Future Work • Conference call with Dr. Wood • Set up an appointment with a VU surgeon • Conduct a patent search • Continue researching possible solutions • Begin designing prototype
References • Robotically Drive Intervention: A method of Using CT Fluoroscopy without Radiation Exposure to the Physician. Radiology 2002. Volume 225-Number 1. • AcuBot: A Robot for Radiological Interventions. IEEE-TR&A. • State of the Art in Surgical Robotics:Clinical Applications and Technology Challenges. Computer Aided Surgery, August 2001.
Contact • David Sun david.d.sun@vanderbilt.edu • Xuan Truong xuan.t.truong@vanderbilt.edu • Chris Willingham jc.willin@vanderbilt.edu