Download
1 / 14
140 likes | 255 Views
CotsBots: An Off-the-Shelf Platform for Distributed Robotics. Sarah Bergbreiter and Dr. Kris Pister Berkeley Sensor and Actuator Center October 29, 2003. CCRs. Solar Cell Array. XL. CMOS IC. History of CotsBots. 1mm. 1mm. Add Legs. Smart Dust (Warneke, et al. Sensors2002 ).

E N D
CotsBots: An Off-the-Shelf Platform for Distributed Robotics Sarah Bergbreiter and Dr. Kris Pister Berkeley Sensor and Actuator Center October 29, 2003
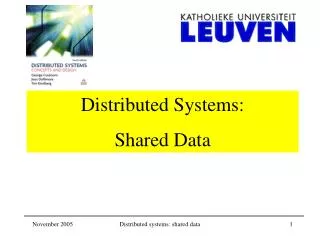
CCRs Solar Cell Array XL CMOS IC History of CotsBots 1mm 1mm Add Legs Smart Dust (Warneke, et al. Sensors2002) Microrobots (Hollar, Flynn, Pister. MEMS2002) Add Robot Body COTS Dust (Hill, et al. ACM OS Review 2000)
Goals for CotsBots • Open-source hardware and software platform for distributed robotics • Small, cheap, off-the-shelf, and modular robots • Emphasize application design software for large (> 50) robot networks • Reduce startup costs to demonstrate distributed multi-robot algorithms
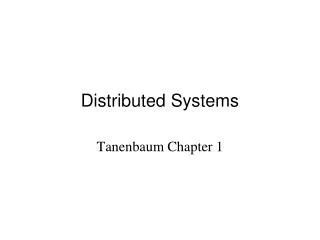
Similar Robot Platforms Size • Khepera II: expensive • Robomote (USC): custom design • Millibots (CMU): custom design • Soccer Robots: custom design • Pioneer: large and expensive TARGET SPACE Pioneer Cost Khepera Millibots Soccer Robots Robomote Microrobots ”Off-the-shelf”-1
CotsBots Hardware MotorBoard Mica Mote • Atmel ATmega128 • 4 Mhz 8-bit CPU • 4KB RAM • 128KB Program Memory • RFM TR1000 radio • 50 kb/s – ASK • Focused hardware acceleration • Network programming • Atmel ATmega8L • 1-8MHz CPU • 8KB Program Memory • 1KB RAM • 2 Discrete H-Bridge Circuits • Speed and Direction Control of Motors • up to 4A, 30V load • 51-pin bus Kyosho Mini-Z RC Car Platform (or others…) Sensor boards available including ADXL202e, magnetometer, light, temp, sound, etc.
CotsBots Hardware: Stats Size 6cm 13cm 6cm Cost • Power: ~1 hour on 4 AAA batteries • Speed: Over 120 cm/sec • Turning Radius: +/- 30o • 80 robots built thus far Approximately 10 robots assembled per hour from purchased components ”Off-the-shelf”-1
Robot Application Mica Software Radio Timer Robot Motor Packet Motor Software MiniZ Motor Packet Motor1 MZServo ADC Motor2 MotorBoard Software CotsBots Software • Use open-source NesC language and code provided by TinyOS group (available on SourceForge) • TinyOS is an event-driven operating system useful for behavioral and FSM-type applications • Try to abstract as much as possible from the application writer (developer should focus on algorithms) • Remain flexible by keeping component-based design
Robot Application Mica Software Radio Timer Robot Motor Packet Motor Software MiniZ Motor Packet Motor1 MZServo ADC Motor2 MotorBoard Software CotsBots Software • Use open-source NesC language and code provided by TinyOS group (available on SourceForge) • TinyOS is an event-driven operating system useful for behavioral and FSM-type applications • Try to abstract as much as possible from the application writer (developer should focus on algorithms) • Remain flexible by keeping component-based design
CotsBots Software • Use open-source NesC language and code provided by TinyOS group (available on SourceForge) • TinyOS is an event-driven operating system useful for behavioral and FSM-type applications • Try to abstract as much as possible from the application writer (developer should focus on algorithms) • Remain flexible by keeping component-based design Robot Application Mica Software Radio Timer Robot Motor Packet Motor Software Tank Motor Packet Motor1 Motor2 MotorBoard Software
Building an Application: Beep Diffusion • Simple algorithm to spread robots apart • Adjusting microphone gain adjusts distance robots move apart Send Msg/Beep Time Slot Manager My Slot Heard Msg Listen Done Driving Heard Beep Done Driving Obstacle Drive Hit Obstacle
Beep Diffusion SlotManager Robot Radio Tone Sampling Obstacle Acoustic Beacon Accelerometer Timer MotorPacket Timer Buzzer Mic Timer Radio Radio Timer ADC UART ADC Building an Application: Beep Diffusion • Build the component graph • Write some components (blue boxes are free!) • Add a sensorboard with sensors required (4kHz buzzer, mic, 2-axis accelerometer)
Implementation 5 robots in 10ft x 10ft area 3.5 second slot time Difficulties with buzzer/tone detector hardware lead to inconsistent beep radius Building an Application: Beep Diffusion
Conclusions Reduced the startup costs (time and money) for designing distributed robot applications • A small, inexpensive, off-the-shelf, and modular hardware platform has been built for distributed robot applications • TinyOS provides an open-source software platform which promotes abstraction, code re-use, and flexibility • Simplified application development for simple distributed algorithms
Acknowledgements Doug Gage and DARPA/SDR, DARPA/NEST for funding Dr. David Culler and the TinyOS group Mica motes distributed by: http://www.xbow.com TinyOS and CotsBots code available at: http://www.sourceforge.net/projects/tinyos