Download
1 / 57
590 likes | 759 Views
GPS Basic Theory. Contents. GPS General Characteristics GPS System Components Outline Principle: Range Position Range Determination from: Code Observations Phase Observations. Error Sources Differential GPS Initial Phase Ambiguity Resolving the Ambiguity Dilution of Precision

E N D
GPS Basic Theory
Contents • GPS General Characteristics • GPS System Components • Outline Principle: • Range • Position • Range Determination from: • Code Observations • Phase Observations • Error Sources • Differential GPS • Initial Phase Ambiguity • Resolving the Ambiguity • Dilution of Precision • Summary
Developed by the US Department of Defense • Provides • Accurate Navigation 10 - 20 m • Worldwide Coverage • 24 hour access • Common Coordinate System • Designed to replace existing navigation systems • Accessible by Civil and Military
Range = Time Taken x Speed of Light Xll Xll l l lX lX ll ll X X lll lll Xl Xl Vlll Vlll lV lV Vll Vll V V Vl Vl GPS Principle : Range
GPS System Components Space Segment NAVSTAR : Navigation Satellite Time and Ranging 24 Satellites 20200 Km Control Segment 1 Master Station 5 Monitoring Stations User Segment Receive Satellite Signal
R3 R2 • 3 Spheres intersect at a point • 3 Ranges to resolve for Latitude, Longitude and Height 2 Spheres intersect as a circle GPS Principle : Point Positioning R1 We are somewhere on a sphere of radius, R1
Outline Principle : Position • The satellites are like “Orbiting Control Stations” • Ranges (distances) are measured to each satellites using time dependent codes • Typically GPS receivers use inexpensive clocks. They are much less accurate than the clocks on board the satellites • A radio wave travels at the speed of light • (Distance = Velocity x Time) • Consider an error in the receiver clock • 1/10 second error = 30,000 Km error • 1/1,000,000 second error = 300 m error
Point Positioning 4 Ranges to resolve for Latitude, Longitude, Height & Time It is similar in principle to a resection problem
Point Positioning Point Positioning with at least 4 GPS satellites and Good Geometry
Error Sources • Like all other Surveying Equipment GPS works in the Real World • That means it owns a set of unique errors
Satellite Errors • Satellite Clock Model • though they use atomic clocks, they are still subject to small inaccuracies in their time keeping • These inaccuracies will translate into positional errors. • Orbit Uncertainty • The satellites position in space is also important as it’s the beginning for all calculations • They drift slightly from their predicted orbit
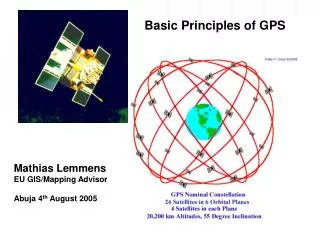
Observation Errors GPS signals transmit their timing information via radio waves It is assumed that a radio wave travels at the speed of light. GPS signals must travel through a number of layers making up the atmosphere. As they travel through these layers the signal gets delayed This delay translates into an error in the calculation of the distance between the satellite and the receiver 19950 Km Ionosphere 200 Km Troposphere 50 Km
Receiver Error • Unfortunately not all the receivers are perfect. They can introduce errors of their own • Internal receiver noise • Receiver clock drift
Multipath Error • When the GPS signal arrives at earth it may reflect off various obstructions • First the antenna receives the signal by the direct route and then the reflected signal arrives a little later
Point Positioning Accuracy Accuracy 10 - 30 m In theory a point position can be accurate to 10 - 30m based on the C/A Code
How do I Improve my Accuracy ? Use Differential GPS
Baseline Vector A B Differential GPS • The position of Rover ‘B’ can be determine in relation to Reference ‘A’ provided • Coordinates of ‘A’ is known • Simultaneous GPS observations • Differential Positioning • Eliminates errors in the sat. and receiver clocks • Minimizes atmospheric delays • Accuracy 3mm - 5m
Baseline Vector A B Differential Code / Phase • If using Codeonly accuracy is in the range of 30 - 50 cm This is typically referred to as DGPS • If using Phase or Code & Phase accuracy is in the order of 5 - 10 mm + 1ppm
Time (0) Time (1) Ambiguity Ambiguity Initial Phase Measurement at Time (0) Measured Phase Observable at Time (1) Initial Phase Ambiguity Initial phase Ambiguity must be determined to use carrier phase data as distance measurements over time
Resolving Ambiguities Once the ambiguities are resolved, the accuracy of the measurement does not significantly improve with time The effect of resolving the ambiguity is shown below: Accuracy (m) 1.00 Ambiguities Not resolved 0.10 Ambiguities Resolved 0.01 Time (mins) 0 120 Rapid Static Static 0 2 5 Rapid Static
Good GDOP Poor GDOP Dilution of Precision (DOP) • A description of purely geometrical contribution to the uncertainty in a position fix • It is an indicator as to the geometrical strength of the satellites being tracked at the time of measurement • GDOP (Geometrical), Includes Lat, Lon, Height & Time • PDOP (Positional) Includes Lat, Lon & Height • HDOP (Horizontal)Includes Lat & Lon • VDOP (Vertical)Includes Height only
Summary of GPS Positioning • Point Positioning : • 10 - 30 m (1 epoch solution, depends on SA) • 5 - 10 m (24 hours) • Differential Code / Phase : • 30 - 50 cm (P Code) • 1 - 5 m (CA Code) • Differential Phase : • 5 mm + 1 ppm
Many Thanks for Your Attention.Leica Geosystems Heerbrugg Switzerland
Real Time GPS Surveying
Contents • What is Real Time ? • What is Real Time GPS ? • Point Positioning • Real Time Differential Code • Real Time Differential Phase • Real Time Differential Requirements • Advantages of Real Time GPS • Limitations • Real Time Industry Standards • Real Time Modes Supported • Applications • Planning a Real Time Survey • Important Considerations - On Site
What is Real Time ? In a scientific sense Real Time can be defined as any action undertaken that results in an instantaneous response. Look at your watch. The time displayed is happening in Real Time.
What is Real Time GPS ? • 3 Distinct Categories: • Point Positioning ( Navigated Position ) • Real Time Differential Code • RTIME Code • RTCM All Version • Real Time Differential Phase • RT-SKI • RTCM All Version • 3 Distinct Operation Methods: • Accuracy • Limitation • Complexity
Point Positioning Accuracy 10 to 20m in each component Dependent on DoD Selective Availability Navigation Applications Not suited for Surveying or Precise Navigation
Real Time Differential Code (RTIME Code) • At Reference Station • Reference Station on a Known Point • Tracks all Satellites in View • Computes corrections for each satellite • Transmits corrections via a communication link in either propriety format or in the RTCM format • At the Rover Station • Rover unit receives the corrections via the communication link • Rover position corrected by applying the received corrections • ACCURACY 0.3m - 0.5m
Real Time Phase (RTSKI) • At Reference Station • Reference Station on a Known Point • Tracks all Satellites in View • Transmits via a communication link GPS • Measurements along with the Reference Station Coordinates • At the Rover Station • Rover receives the GPS Measurements and Reference Station Coordinates via the communication link • Rover undertakes computations to resolve Ambiguities • ACCURACY 1 – 2cm + 2ppm
Real Time Differential Requirements • Initial Coordinates (WGS84) • Known Coordinates • Single Point Positioning • Communication Link • Range to be covered. • Inter-visibility • Weight and Power requirements • Operational Costs • Getting into Local Coordinate Systems • Local Ground • State Plane • GPS Hardware • Dual Frequency • Single Frequency
Advantages of Real Time GPS • Good Accuracy • No post processing • Immediate Results • One man operation • One Base multiple rovers increases production • Collect raw data • Increased confidence • Ease of operation
Limitation • The two largest limitations effecting Real Time GPS Surveying • Obstructions • Multipath • Loss of lock • Communication Link • Range • Location of Transmitter • Power Consumption • Real Time GPS has become an acceptable tool within the Survey Industry. It is not always the correct tool for the task.
Real Time Industry Standard: RTCM • Radio Technical Commission for Maritime • RTCM message typically consists of • Reference station parameters • Pseudorange Corrections • Range Rate Corrections • Corrections are based on the L1 Pseudorange observation • Corrections are broadcast by: • UHF radios up to 40 Km • VHF radios up to 100 Km • Communication Satellites • Every measurement is independent, no need for ambiguity resolution
Real Time Industry Standard: RTCM • E.g: US Coast Guard Nav Beacons: • Broadcast RTCM • Service is free • Accuracy in the range of 1 - 5 m • Ideal for GIS Surveys and hydographic work
Applications • Boundaries • Seismic Stakeout • Profiles • Establishing Portable Control Stations (sharing with Total Stations) • Slope Staking • Topo and Locations • Mapping • Monitoring • Volumes • Photo control • Construction Control and Stakeout
Existing Ground Surface Design Surface in DXF format Applications (Real Time) DTM Stakeout
Applications (Real Time) • Road Alignments • Horizontal • Tangents, Spirals, Curves • Profiles • Parabolic Curves • Cross Sections
Planning a Real Time Project • Accuracy Requirements • Code = meter / sub-meter • Phase = centimeter • Availability of Control • Horizontal • Vertical • Both • Type of Transformation • Local Grid • WGS84
Planning a Real Time Project • Availability of satellites • Installation of Reference Station • Communication Link • Minimum obstructions • Known Coordinates • Check stations
Important Considerations - On Site • Check Hardware • Check Battery and Memory capacity • Check Stations • Verifiy transformation • Verifiy Base Station coordinates • Verifiy Heights of Instruments, Ant. Offsets • Quality Assurance • Coordinate Quality Indicator • Averaging Limit
Many Thanks for Your Attention.Leica Geosystems Heerbrugg Switzerland
Different GPS Operation Types and Applications
CONTENTS • Using GPS for Surveying • Static • Rapid Static • Kinematics • Real Time • Accuracy and Observation Time • Recommended Recording Intervals
Using GPS for Surveying • All GPS Surveying is carried out using differential techniques. That is to say a baseline is measured from a fixed point, (a reference station) to an unknown point (a rover station). • This is undertaken using one of two methods : Post ProcessingThe raw GPS data from the satellites is recorded and processed in the office using software LGO Real TimeThe processing of the data is carried out as you work, giving an instantaneous and accurate position
Static Survey (STS) • All GPS Surveying is carried out using differential techniques. That is to say a baseline is measured from a fixed point, (a reference station) to an unknown point (a rover station). • This is undertaken using one of two methods : Post ProcessingThe raw GPS data from the satellites is recorded and processed in the office using software used to create control points by putting one GPS unit on a known point and the second on the unknown point and collect a data. After that post processing must be done using a software to solve the unknown point Real TimeThe processing of the data is carried out as you work, giving an instantaneous and accurate position
Rapid Static Survey (STS) - 1/2 • Short observation time for baselinesup to 20 km. • Accuracy is5-10 mm + 1 ppm • Applications Control Surveys, GIS city inventories, detail surveys. Replace traversing and local triangulation. Any job where many points have to be surveyed • Advantages Easy, quick, efficient Ideal for short range survey
Reference Rover Rover Rover Rover Rover Rover Rover Rover 8 Rapid Static Survey (STS) - 2/2 • 1 Reference and 1 Rover 5 4 6 7 3 Ref 1 1 2 Training GPS System 1200 June 2007 DJE-3192
Reference Rover Rover Rover Rover Rover Rover Rover Rapid Static Survey (STS) - 2/2 • 2 Reference and 1 Rover • 1 Reference and 1 Rover 5 4 6 7 3 Ref 1 Ref2 1 2 Training GPS System 1200 June 2007 DJE-3192
Reference Reference Reference Reference Reference Reference Rover Rover Rover Rover Rover Rover Rover Rover Rover Reference 6 7 7 1 1 2 Rapid Static Survey (STS) - 2/2 • 2 Reference and 1 Rover • 1 Reference and 1 Rover (leap frog) • 1 Reference and 1 Rover 5 4 6 7 3 Ref 1 Ref2 1 2 Training GPS System 1200 June 2007 DJE-3192