Download
1 / 31
310 likes | 568 Views
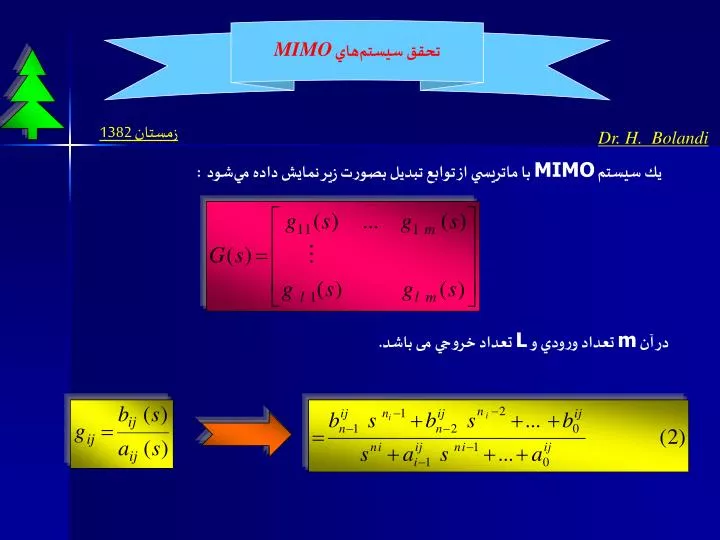
تحقق سيستمهاي MIMO. زمستان 1382. Dr. H. Bolandi. يك سيستم MIMO با ماتريسي از توابع تبديل بصورت زير نمايش داده ميشود :. در آن m تعداد ورودي و L تعداد خروجي می باشد. در سيستمهاي چند متغيره روشهايي وجود دارد كه ميتواند نهايتاً يك تحقق غير مينيمال را به تحقق مينيمال تبديل نمايد.

E N D
تحقق سيستمهاي MIMO زمستان 1382 Dr. H. Bolandi يك سيستم MIMO با ماتريسي از توابع تبديل بصورت زير نمايش داده ميشود: در آن m تعداد ورودي وL تعداد خروجي می باشد.
در سيستمهاي چند متغيره روشهايي وجود دارد كه ميتواند نهايتاً يك تحقق غير مينيمال را به تحقق مينيمال تبديل نمايد. زمستان 1382 Dr. H. Bolandi (3)
تحقق معادله (3) بصورت زير است: زمستان 1382 Dr. H. Bolandi
مثال : زمستان 1382 Dr. H. Bolandi
«تحليل پايداري» زمستان 1382 Dr. H. Bolandi مقدمه : پايداري همانند موضوعات كنترلپذيري و مشاهدهپذيري يك خاصيت كيفي از سيستم مهندسي است. بدون شك مهمترين مشخصه يك سيستم كنترل ميتواند پايداري آن باشد.نكتهاي كه حائز اهميت است آن است كه در سيستمهاي عملي موضوع طراحي جدا از درنظر گرفتن موضوع پايداري نيست. درجة پيچيدگي تحليل پايداري سيستمهاي ديناميكي با تغيير مدلهاي سيستم از LTI به سيستمهاي غيرخطي يا TV بسرعت تغيير ميكند و لذا بدست آوردن روشهايي كه بتواند به اين سيستمها پاسخگو باشند از اهميت ويژهاي برخوردار است.
تعاريف پايداري : بطور كلي اگر سيستمي بدون اعمال ورودي و هرگونه اغتشاشي داراي خروجي باشد كه در يك حالت باقي مانده است سيستم را در حالت تعادل ميگوئيم. حال اگر يك سيستم كنترل خطي مستقل از زمان تحت تأثير يك اغتشاش قرار گيرد و خروجي آن بالاخره به حالت تعادل بازگردد سيستم راپايدارميخوانيم. در مقابل اگر سيستم LTI تحت تأثير اغتشاش قرار گرفته و خروجي براي هميشه نوسان كند آنگاه سيستم را ناپايدار ميخوانيم. مثال: G,F,E,A و فيمابين D,B را نقاط تعادل گويند. نقاطي مانند F,A نقاط ناپايدار هستند. نقاطي مانند E,G نقاط پايدار هستند. فيمابين D,B نقاط پايدار طبيعي ميگوييم. (به نقطه تعادل باز نميگردد اما كمي جلو رفته دوباره ميايستد)
لياپونف دو ديدگاهرا مطرح ميكند : روش اول :روشهاي موجود به پاسخ سيستم بستگي دارند. روش دوم : روشهايي هستند كه به حل معادلات سيستم بستگي نداشته و بدين علت است كه از روشهاي كاربردي محسوب ميشوند. تعاريف :
حالت تعادل : اگرسيستم L I T باشد : آنگاه اگر A ناويژه باشد تنها يك حالت تعادل و اگر A تكين نباشد تعداد بيشماري حالت تعادل خواهيم داشت.براي تعيين حالتهاي تعادل لازم نيست كه معادله ديفرانسيل (1) را حل كنيم بلكه حل (2) كافي خواهد بود.
پايداري از ديد لياپونف : در اينجا يك ناحيه كروي با شعاع k حول حالت تعادل بصورت زير مشخص می کنيم : زمستان 1382 Dr. H. Bolandi
پايداري مجانبي از ديد لياپونف : تذکر : در عمل پايداري مجانبي مهمتر از پايداري مطلق است. همچنين از آنجا كه پايداري مجانبي يك مفهوم موضعي است صرف برقرار كردن پايداري مجانبي به معناي درست كار كردن سيستم نميباشد. اگر كه انحرافات اوليه حالت سيستم از حالت تعادل زياد باشد آنگاه پايداري مجانبي اطلاعات زيادي را از رفتار سيستم نخواهد داد و در واقع با انحراف زياد ممكن است سيستم حتي ناپايدار شود. بنابراين در عمل عموماً داشتن اندازة بزرگترين محدودة پايداري مجانبي لازم است كه به اين بزرگترين محدودة پايداري، حوزه جذب ميگوييم.
ـ پايداري مجانبي بزرگ مقياس( Enlarge(: اگر پايداري مجانبي به ازاي همة حالتهاي شروع مسيرهاي برقرار باشد آنگاه حالت تعادل را پايدار مجانبي بزرگ مقياس ميگوييم. زمستان 1382 Dr. H. Bolandi ناپايداري :
پايداري :BIBO اگر كه نمايش سيستم برحسب توصيف ورودي ـ خروجي داده شده باشد آنگاه بحث پايداري BIBO قابل طرح است. بايد توجه داشت كه توصيف ورودي ـ خروجي سيستم فقط هنگامي قابل انجام است كه سيستم داراي شرايط اوليه نبوده و خروجي سيستم تنها توسط ورودي اعمال شده تعيين گردد. زمستان 1382 Dr. H. Bolandi تعريف : يك سيستم بدون شرايط اوليه را پايدار BIBO گويند اگر و فقط اگر براي هر ورودي محدودخروجي آن محدود باشد. تذکر : شايان توجه است كه اگر شرايط اوليه را وارد كنيم ممكن است كه سيستم پايداري BIBO را از دست بدهد.بايد توجه داشت كه در تعاريف ارائه شده در بالا ما پايداري سيستم را بدون اعمال ورودي (حالت صفر) درنظر گرفتيم. پايداری T: يك سيستم ديناميكي خطي را كاملاً پايدار ميگوئيم (Totally stable) اگر و فقط اگر براي هر شرط اوليه حالت و هر ورودي محدود، خروجي و كليه متغيرهاي حالت سيستم محدود باشد. شرايط پايداري T از ساير پايداريهاي ارائه شده سختتر است. در اينجا نه تنها خروجي بايد محدود باشد بلكه متغيرهاي حالت هم بايد محدود باشند.اين محدوديت نه تنها بايد براي حالت صفر بلكه بايد براي كليه شرايط اوليه سيستم برقرار باشد.
پايداري نمايي : زمستان 1382 Dr. H. Bolandi
پايداري سيستمهاي LTI زمستان 1382 Dr. H. Bolandi
آنگاه پاسخ سيستم به هر حالت اوليه را ميتوان بصورت زير نشان داد : زمستان 1382 Dr. H. Bolandi براي سيستمهاي قطري ناپذير اين عبارت شامل قسمتهاي اضافي بصورت زير می باشد : قضيه 1: سيستم خطي LTI زير را درنظر بگيريد. اين سيستم پايدار به مفهوم لياپونف است اگر و فقط اگر :
الف :كلية مقادير ويژه A قسمتهاي حقيقي غيرمثبت داشته باشند. ب :آن دسته از مقادير ويژه A كه قسمتهاي حقيقي آن صفر هستند، صفرهاي ساده چند جملهاي معادله مشخصه A باشند. بعبارت ديگر در صورت تبديل شدن A به بلوك جردن، درجة بلوك جردن متناظر با مقدار ويژهاي كه قسمتهاي حقيقي آن صفر است، يك باشد. زمستان 1382 اثبات :
فرض ميكنيم كه يك ماتريس ناويژه T به نحوي وجود دارد كه A را بفرم كانونيكي جردن ميبرد. زمستان 1382 Dr. H. Bolandi
قضيه 2: سيستم زير پايدار مجانبي است اگر و فقط اگر پايداري مجانبي در كل باشد.
قضيه 3: سيستم خطی زير پايدار مجانبي است اگر و فقط اگر كليه مقادير ويژه A داراي قسمتهاي حقيقي منفي باشند. زمستان 1382 Dr. H. Bolandi قضيه 4: سيستم خطی زير پايدار مجانبي است نهايي است اگر و فقط اگر پايدار مجانبي باشد. قضيه 5: سيستم خطی به مفهوم لياپانوف پايدار است اگر و فقط اگر : الف ـكليه مقادير ويژه A قسمتهاي حقيقي غير مثبت داشته باشند (قسمت حقيقي منفي يا صفر ) . ب ـآن دسته از مقادير ويژه A كه قسمتهاي حقيقي آنها صفر هستند، صفرهاي ساده چند جملهاي مشخصه A(minimal Polynomial)باشند .
زمستان 1382 Dr. H. Bolandi مثال:
مثال: زمستان 1382 Dr. H. Bolandi System is Unstable مثال: System is Stable
قضيه 6: سيستم خطی زير پايدار مجانبي است اگر و فقط اگر كليه مقادير ويژه A قسمتهاي حقيقي اكيداً منفي داشته باشند. زمستان 1382 Dr. H. Bolandi با استفاده از آزمونهاي كلاسيك شيوه Routh در خصوص پايداري سيستم تحقيق كنيم. روش دوم لياپونف : بدون استفاده از حل معادلات و همچنين بدون بدست آوردن معادله مشخصه در خصوص پايداري بحث كنيم. ميدانيم هر قطب G(s) مقدار ويژه A است اما بالعكس آن صحيح نيست. شرط پايداري: سيستم تعريف شده با ماتريس تبديلG(S) پايدار BIBO است اگر و فقط اگر قطبهاي هر عنصر G(S) قسمتهاي حقيقي منفي داشته باشد.
نکته: اگر سيستم خطی با شرايط اوليه صفر پايدار مجانبي باشد آنگاه پاسخ حالت صفر آن نيز پايدار BIBO است. وليكن پايداري BIBO پاسخ حالت صفر بر پايداري مجانبي حالت صفر دلالت نميكند. زمستان 1382 Dr. H. Bolandi مثال: not A.S.Y Stable
قضيه 6 : اگر سیستم خطی، كنترلپذير و مشاهدهپذير باشند آنگاه عبارات زير معادل هستند: زمستان 1382 Dr. H. Bolandi 1)سيستم كاملاً پايدار است. 2)پاسخ حالت صفر BIBO است. 3)پاسخ حالت صفر پايدار مجانبي است. 4)كليه قطبهاي ماتريس تبديل داراي قسمتهاي حقيقي منفي هستند. 5)كليه مقادير ويژه A داراي قسمتهاي حقيقي منفي ميباشند.
روش دوم لياپونف: زمستان 1382 Dr. H. Bolandi روش دوم يا مستقيم لياپونف بدون بدست آوردن پاسخ سيستم يعني x(t) پايداري سيستمهاي خطي و غيرخطي را تعيين ميكند. اين روش برعكس روش اول كه تعيين مقدار ويژه معادلات خطي الزامي است، بوده و بدون حل معادلات سيستم ميتواند به تعيين پايداري بپردازد. اين روش با جامعيتي كه دارد براي سيستمهاي با ورودي (بدون ورودي )LT / LTI ، خطي / غيرخطي قابل اعمال است. در اين روش با انتخاب يك تابع اسكالر (v(xبه تعيين پايداري سيستم ميپردازيم. وقتي كه (v(x شرايط لياپونف را برآورده كند آن را تابع كانديداي لياپونف ميناميم. مشكل اساسي موجود در اين روش آن است كه تعيين يك تابع لياپونف مناسب به راحتي مسير نميباشد. و عدم برآورده شدن شرايط پايداري به معناي عدم پايداري يا عدم وجود يك تابع كانديداي لياپونف نيست.
تعاريف • معين مثبت بودن توابع اسكالر: زمستان 1382 تابع اسكالر v(x) را در ناحيه كه در برگيرنده مبدأ فضاي حالت است، P.D ميگوييم كه هرگاه به ازاي تمام حالتهاي غيرصفر داشته باشيم : • معين منفی بودن توابع اسكالر: تابع اسكالر v(x) را معين منفیمی گوييم، هرگاه v(x)- ، معين مثبت باشد . • نيمه معين مثبت PSD تابع اسكالر v(x) را PSD گوييم هرگاه جزء در مبدأ و در برخي حالتهاي ديگر ناحيه مثبت باشد. كه تابع صفر است در بقيه حالتهاي ناحيه
نيمه معين منفیN.S.D تابع اسكالر (v(x را N.S.D گوييم اگر كه (PSD , -v(x باشد. زمستان 1382 • نامعين بودن اسكالر هم مقادير مثبت و هم مقادير منفي را دارا باشد آنرا نامعين ميگوييم. اگر تابع اسكالر (v(x در ناحيه مثال: مثال:
مثال: زمستان 1382 Dr. H. Bolandi مثال: نامعين مثال:
صورتهاي درجه 2: زمستان 1382 Dr. H. Bolandi