Download
1 / 1
10 likes | 149 Views
Swarm Intelligence. Relative Positioning. Distributed Systems. Communication Relaying. PicoBots – A Small-Sized Exploration Rover Standard for Universities. Proposal of a pico-class robotic platform primarily intended for future lunar exploration Inspired by Cubesat standard

E N D
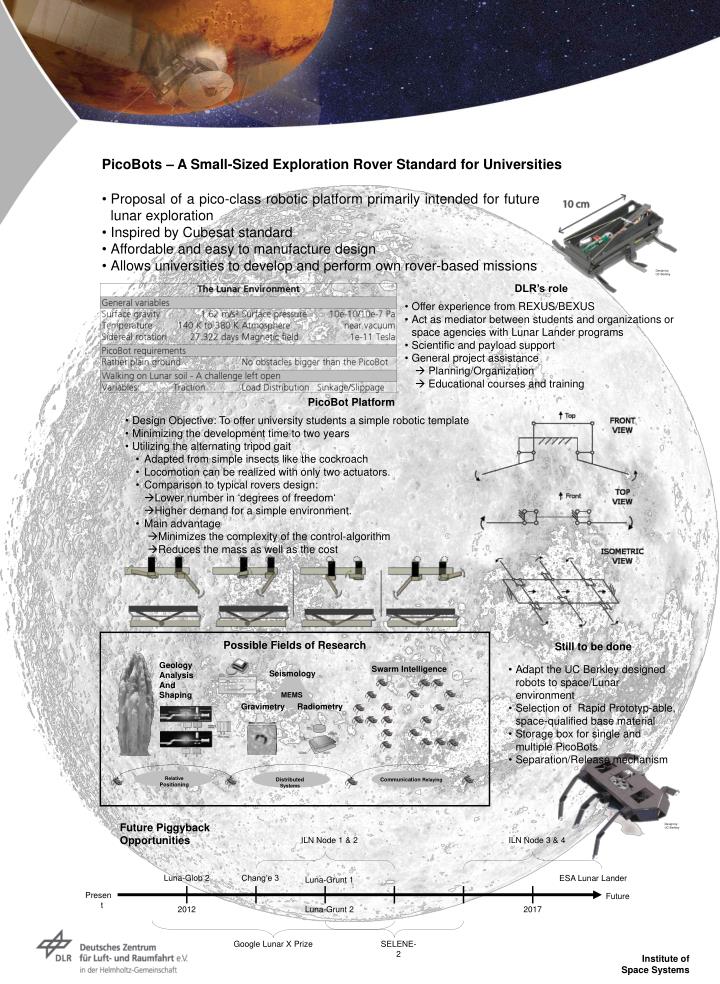
Swarm Intelligence Relative Positioning Distributed Systems Communication Relaying PicoBots – A Small-Sized Exploration Rover Standard for Universities • Proposal of a pico-class robotic platform primarily intended for future lunar exploration • Inspired by Cubesat standard • Affordable and easy to manufacture design • Allows universities to develop and perform own rover-based missions Design by: UC Berkley • DLR’s role • Offer experience from REXUS/BEXUS • Act as mediator between students and organizations or space agencies with Lunar Lander programs • Scientific and payload support • General project assistance • Planning/Organization • Educational courses and training • PicoBot Platform • Design Objective: To offer university students a simple robotic template • Minimizing the development time to two years • Utilizing the alternating tripod gait • Adapted from simple insects like the cockroach • Locomotion can be realized with only two actuators. • Comparison to typical rovers design: • Lower number in ‘degrees of freedom‘ • Higher demand for a simple environment. • Main advantage • Minimizes the complexity of the control-algorithm • Reduces the mass as well as the cost Possible Fields of Research • Still to be done • Adapt the UC Berkley designed robots to space/Lunar environment • Selection of Rapid Prototyp-able, space-qualified base material • Storage box for single and multiple PicoBots • Separation/Release mechanism Geology Analysis And Shaping MEMS Seismology Radiometry Gravimetry Future Piggyback Opportunities Design by: UC Berkley ILN Node 1 & 2 ILN Node 3 & 4 Luna-Glob 2 Chang’e 3 ESA Lunar Lander Luna-Grunt 1 Present Future 2012 Luna-Grunt 2 2017 Google Lunar X Prize SELENE-2 Institute of Space Systems