Download
1 / 19
190 likes | 316 Views
Gaze Controlled Robotic Platform. Nick Harezga Jeremy Thornton Matthew Wozniak. Agenda. Overview Objectives Requirements Design Implementation User Interface Interfaces & Communication Arduino Robot Algorithms Vision Risks Multidisciplinary Aspects Testing Costs. Overview.

E N D
Gaze Controlled Robotic Platform Nick Harezga Jeremy Thornton Matthew Wozniak
Agenda • Overview • Objectives • Requirements • Design • Implementation • User Interface • Interfaces & Communication • Arduino • Robot • Algorithms • Vision • Risks • Multidisciplinary Aspects • Testing • Costs
Overview The primary goal of the project is to allow a user to control a robot using their “gaze” (which in this case is specified using a laser pointer). To do this we need a few components • A robot which can move freely about a room • A system to determine the location of a user’s “gaze” • A method of locating the robot relative to the user’s gaze • A way for the user to control when the robot moves
Objectives • Creation of a system capable of detecting a robot’s location relative to a target destination • Also able to transform this information into discrete instructions • Construction of a robot capable of wirelessly receiving and executing movement instructions • Intuitive user controls with next to no learning curve • The robot should be able to operate in a variety of indoor environments within a field large enough to be considered useful
Requirements • Accuracy • The robot should be able to move to within a “tennis ball area” of the laser target location • Longevity • An hour of regular use • Up to the maximum longevity of the Asus EeePC battery on standby (approx 9 hours) • Area of Operation • Operate from up to 8 feet in front of the camera (large portion of a standard room size) • Reliability • System functions properly under various lighting conditions ranging from full daylight to artificial lighting at nighttime • Simplicity • 2 button user remote • Simple calibration and setup procedures • Portable
Design The project consists of 5 primary components: • Computer • Robot (mounted with a calibration point) • Scene Camera • Wireless Module • User Control Module
Implementation • Computer: Asus EeePC 1000HE • Vision algorithms: OpenCV in Python • Robot control: Arduino Pro Mini 3.3V 8MHz • Communication: Xbee 1mW Wireless Modules • User Input: FT245RL USB to FIFO Module
User Interface • Control • Laser targeting device (red laser pointer) • Wired 2-button remote • Connected via USB to the PC • Status LEDs to report current activity • Diagnostics • Robot status LEDs (error, command in progress, etc.)
Interfaces & Communication • PC Robot • Handled via Xbee transparent mode • Wireless serial link • Tested and confirmed functional between PC and Arduino • Human perceivable latency in loopback test program is negligible • PC serial communication via PySerial library (Python) • PC User Remote • FT245LR USB to FIFO
Arduino (Pro Mini 3.3V) • Serial communication (TX0 and RX1) • External Interrupts • Wheel encoders on pins 2 and 3 • PWM signals to Ardumoto motor shield • Pins 5 and 6 via analogWrite() function • Sets a duty cycle from 0 to 100% based on the value in [0,255] • Voltage supplied to motors varies directly with the duty cycle • Alternatively, digital writes can be used to simply turn motors on and off if speed control becomes unnecessary • Direction bit on pins 4 and 7 – logic HIGH or LOW • Status LEDs • Pins 8 and 9 – logic HIGH or LOW • 4 digital pins remain available
Robot • Constructed using Legos • Lego motor spec @9V • Motors will be driven by the Arduino through the Ardumoto motor shield • Reflective wheel encoders used for turning and distance tracking
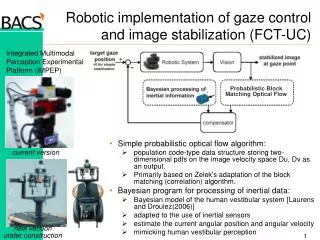
Algorithms • Main loop: • Read inputs from user control • Capture locations of robot and laser target via scene camera • Un-distort image • Determine location of laser target • Determine location and orientation of robot • Calculate path of movement for the robot • Robot movement: • Update velocity vector • Recalculate position • Optionally recapture positions using scene camera for adjustments • Each stage has error correction and diagnostic output for debugging purposes
Algorithms - Vision • Camera is extremely important • We are using the Logitech Pro 900 • 1600x1200 max resolution • Un-distortion • OpenCV has built in functions for detecting and removing camera and perspective distortion • Robot orientation and location • Easily distinguishable and unique shape on the top of the robot (“calibration point”) • Laser target detection • Convert image to HSV and filter
Risks • Robot accuracy • Largely reliant on algorithms and wheel encoder resolution • Detection of robot orientation and position • Longevity requirements • 3.7V Li-Ion 2000mAh • Arduino – Idle: 6mA (measured), Active: 12mA • Xbee – 55mA (measured) • Ardumoto – 36mA (rated Icc max) • 7.2V NiMH 3000mAh • Motors – 0.12A each under load
Multidisciplinary Aspects • Computer Science • Interpreting results of computer vision algorithms into both diagnostic information and discrete instructions • Imaging Science • Image normalization, interpretation and point detection • Computer Engineering • Command encoding and communication as well as microcontroller software • Electrical Engineering • Motor control, button debouncing, battery concerns and circuitry • Mechanical Engineering • Robot weight and design
Testing • Subsystem/Component Testing • Scene camera • Detection algorithm • Communication • Wireless • Arduino to Xbee • PC to Xbee • Arduino • Command interpreting • Pin output • Do other pieces of hardware work with the output?
Testing (cont.) • Subsystem/Component Testing • Robot • Battery life • Movement • Straight line and turning • Gradual Integration • System Testing • Does everything work together?