Download
1 / 27
280 likes | 467 Views
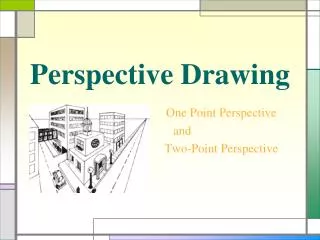
Perspective & Imaging Transformation. Prof.Dr. Aniati Murni (R 1202) Dina Chahyati, M.Kom, (R 1226) Fakultas Ilmu Komputer Universitas Indonesia. Perspective & Imaging Transformation. y Y. x X. Bidang Citra. (X,Y,Z). z. Z. Pusat Lensa. (x,y). X. Z -. x.

E N D
Perspective & Imaging Transformation Prof.Dr. Aniati Murni (R 1202) Dina Chahyati, M.Kom, (R 1226) Fakultas Ilmu Komputer Universitas Indonesia
Perspective & Imaging Transformation y Y x X Bidang Citra (X,Y,Z) z Z Pusat Lensa (x,y) X Z - x
Camera coordinate system (x,y,z) danWorld coordinate system (X,Y,Z) • Bila kedua sistem sumbu (camera dan world) dihimpitkan, maka obyek (pada ruang world) dan bayangan (pada bidang citra) akan membentuk segitiga sama dan sebangun, sehingga: x/ = X/(Z - ) dan x = X/( - Z); y = Y/( - Z); z = Z/( - Z)
Transformasi Geometrik y X’ = X + Tx Y’ = Y + Ty Translasi x Skala X’ = Sx.X Y’ = Sy.Y Rotasi X’ = X cos(a) Y’ = X sin(a) a
Homogeneous Coordinate System • Diperlukan suatu representasi yang seragam (homogeneous representation) • Untuk memungkinkan dilakukannya transformasi komposit secara efisien • Untuk menyimpan faktor normalisasi koordinat akibat transformasi yang dilakukan berturut-turut • Matrix Transformasi Translasi Skala Rotasi 1 0 0 Tx Sx 0 0 0 1 0 0 0 0 1 0 Ty 0 Sy 0 0 0 cos sin 0 0 0 1 Tz 0 0 Sz 0 0 -sin cos 0 0 0 0 1 0 0 0 1 0 0 0 1
Perspective Transformation • Matrix transformasi perspektif 1 0 0 0 0 1 0 0 0 0 1 0 0 0 -1/ 1 • Tanda minus artinya gambar obyek terbalik, adalah jarak pusat lensa, dan 1/ merupakan faktor skala. • Koordinat obyek pada camera system dapat diturunkan dari koordinat obyek pada world system dengan menggunakan transformasi perspektif.
Cartesian dan Homogeneous coordinat system • Koordinat obyek pada world system dalam bentuk sistem koordinat Cartesian (Wc) dan homogeneous coordinate system (Wh) X kX Wc = Y Wh = kY Z kZ k k adalah non-zero constant, biasanya diambil k = 1. • Koordinat obyek pada camera system adalah Cc dan Ch masing-masing untuk sistem koordinat Cartesian dan homogeneous coordinate system (next slide)
World to Image transformation • Perhitungan koordinat homogeneous sistem kamera : 1 0 0 0 kX kX Ch = 0 1 0 0 kY = kY 0 0 1 0 kZ kZ 0 0 -1/ 1 k -(kZ/ )+k • Koordinat Cartesian Cc (x,y,z) diperoleh dengan membagi koordinat Ch (xh,yh,zh) dengan faktor koordinat ke empat, dalam hal ini yaitu: -(kZ/ )+k
Camera Basic Mathematical Model • Koordinat Cartesian camera system x kX/(-(kZ/ )+k) X/( - Z) Cc = y = kY/(-(kZ/ )+k) = Y/( - Z) z kZ/(-(kZ/ )+k) Z/( - Z) • Hubungan antara (x,y,z) dan (X,Y,Z) diatas disebut sebagai Camera Basic Mathematical Model
Image to World Transformation • Suatu titik obyek (Xo,Yo,0) terletak di bidang citra, dengan camera system dan world system berhimpit dan bidang citra terletak pada Z = 0, maka koordinat homogeneous dari obyek tersebut pada world system adalah: 1 0 0 0 kXo kXo Wh = 0 1 0 0 kYo = kYo 0 0 1 0 0 0 0 0 1/ 1 k k • Titik (Xo,Yo) merupakan titik proyeksi seluruh titik-titik 3-D yang terletak pada garis yang melalui (Xo,Yo,0) dan (0,0, ).
Image to World Transformation • Persamaan garis yang melalui titik (Xo,Yo,0) dan (0,0, ) adalah: (lihat penurunan dari rumus segitiga sebangun yang menghasilkan hubungan antara camera dan world system) X = Xo/ .( - Z) Y = Yo/ .( - Z) • Dengan demikian kita tidak dapat menentukan titik 3-D hanya dari proyeksi titik tersebut pada bidang citra tanpa diketahuinya koordinat Z pada ruang 3-D tersebut (lihat slide berikut)
Perspective & Imaging Transformation y Y x X Bidang Citra (X,Y,Z) z Z Pusat Lensa (x,y) X Z - x
Image to World Transformation • Ambil suatu titik pada citra (Xo,Yo,z) dimana z adalah variabel bebas yang menyatakan kedalaman atau jarak • Maka: kXo kXo Ch = kYo Wh = kYo kz kz k kz/ + k • Titik 3-D nya adalah: X = Xo/( + z) Y = Yo/( + z) Z = z/( + z)
Distorsi Geometrik • Distorsi geometrik merupakan distorsi spatial • Sumber: sensor (internal), platform (external) dan gerakan bumi • Koreksi bila distorsi bersifat sederhana: centering (translasi), size (skala), skew (rotasi). Lihat matriks transformasi (lihat next slide). • Koreksi bila distorsi bersifat kompleks: image registration/rectification, misal dengan bilinear transformation dan least square method (contoh padaslide-slide berikut): X’ = aX + bY + cXY + d Y’ = eX + f Y + gXY + h
Koreksi Geometrik – Transformasi 2D 1 0 0 Tx 0 1 0 Ty 0 0 1 Tz 0 0 0 1 Centering Size Sx 0 0 0 0 Sy 0 0 0 0 Sz 0 0 0 0 1 1 0 0 0 0 cosA sinA 0 0 –sinA cosA 0 0 0 0 1 Skew
Koreksi Geometrik – Image Registration Registered GCP
Koreksi Geometrik – Image Registration • Diperlukan pasangan-pasangan titik-titik yang berkoresponden antara kedua citra (disebut ground control points – GCPs) • Image registration dengan bilinear transformation dan least square method: X’ = aX + bY + cXY + d Y’ = eX + f Y + gXY + h Jumlah pasangan persamaan diatas adalah sebanyak ground control points yang digunakan • Salah satu citra dijadikan acuan (koordinat piksel (X,Y)), maka koordinat piksel citra yang diregistrasi (X’,Y’) dapat dihitung dari persamaan diatas dengan menyelesaikan koefisien a, b, c, dan d.
Distorsi Radiometrik • Muncul dalam bentuk distribusi intensitas yang tidak tepat • Sumber: kamera (internal) dalam bentuk shading effect, atmosfer (external) dalam bentuk besarnya intensitas yang tidak sama walaupun untuk obyek yang kategorinya sama, akibat adanya kabut, posisi matahari atau substansi atmosfir lainnya • Koreksi: dengan teknik filtering
Distorsi Radiometrik dan Geometrik Citra daerah Lombok: distorsi/gangguan dalam bentuk skew (geometrik – external - rotasi ) dan adanya striping (radiometrik – internal – low pass filter)
Frekwensi tinggi dan rendah pada citra Frekwensi rendah Frekwensi tinggi
Distorsi RadiometrikDistorsi bersifat frekwensi rendah Citra foto tangkai daun (MSU, 1990): distorsi radiometrik blurring – filtering dengan high pass filter
Distorsi RadiometrikDistorsi bersifat frekwensi tinggi Citra satelit MSS: distorsi radiometrik striping – filtering dengan low pass filter
Fungsi Impulse • Fungsi Impulse • Fungsi Delta Dirac pada domain kontinue dan Fungsi Delta Kronecker pada domain diskrit d(x)yang mempunyai nilai 1 pada suatu x dan mempunyai nilai 0 pada x lainnya. • Fungsi Delta d(x) 1 x
Impulse Response • Impulse Response • Menurut teori filtering, pada sistem yang ideal, sinyal yang masuk (impulse) sama dengan sinyal yang keluar (impulse response). Hal tersebut dapat digambarkan dengan transfer function dalam bentuk fungsi Delta Dirac. • Sistem yang ideal proses konvolusi f(x) d(x) f(x)*d(x)
POINT SPREAD FUNCTION (PSF)(FUNGSI SEBARAN TITIK) • Sistem yang tidak ideal • Pada sistem yang tidak ideal, sinyal yang masuk mengalami degradasi atau penurunan kwalitas. • Blurring proses konvolusi f(x) g(x) f(x)*g(x) an impulse is a point of light g(x) blurs the point (optical phenomenon yang disebut point spread function - PSF) g(x) juga disebut sebagai impulse response function
Fourier Transform (akan dipelajari) • Fourier Transform • Akan dipelajari secara khusus pada topik Image Transform • Mengubah representasi citra dari domain spasial ke domain frekwensi • Sebaliknya Inverse Fourier Transform akan mengubah representasi citra dari domain frekwensi ke domain spasial • Memudahkan proses konvolusi dari bentuk integral menjadi bentuk perkalian biasa