Download
1 / 24
240 likes | 395 Views
Automation & Robotics Research Institute (ARRI). Nonlinear Network Structures for Optimal Control. Frank L. Lewis and Murad Abu-Khalaf Advanced Controls, Sensors, and MEMS (ACSM) group. System. Cost. The Usual Suspects. NONLINEAR QUADRATIC REGULATOR. Generalized HJB Equation.

E N D
Automation & Robotics Research Institute (ARRI) Nonlinear Network Structures for Optimal Control Frank L. Lewis and Murad Abu-Khalaf Advanced Controls, Sensors, and MEMS (ACSM) group
System Cost The Usual Suspects
NONLINEAR QUADRATIC REGULATOR Generalized HJB Equation Optimal Control (SVFB) Hamilton-Jacobi-Bellman (HJB) Equation
PROBLEM- HJB usually has no analytic solution SOLUTION- Successive Approximation a stabilizing control A contraction map (Saridis) Saridis and Beard used Galerkin Approx to allow for GHJB solution Converges to optimal solution Gives u(x) in SVFB form
For Constrained Controls NONLINEAR NONQUADRATIC REGULATOR with Nonquadratic form- Lyshevsky PD if u
New GHJB is Natural, exact, no approximation u(t) constrained if f(.) is a saturation function! tanh(p) 1 p -1
Problem- cannot solve HJB Solution- Use Successive Approximation on GHJB Iterate: a stabilizing control
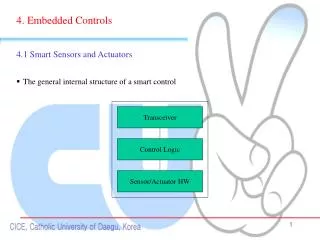
1 VT WT (.) x1 (.) y1 2 (.) x2 (.) y2 3 (.) xn (.) ym L inputs outputs (.) hidden layer Two-Layer Neural Network with adjustable output weights Problem- Cannot solve GHJB! Solution- Neural Network to approximate V(i)(x) Select basis set
Cost gradient approximation Let Nonzero residual! Then GHJB is
To minimize the residual error in a LS sense Evaluate the GHJB at a number of points on Note, if Then, GHJB is
Evaluating this at N points gives L x N coefficient matrix Solve by LS NN Training Set!
Select the N sample points xk Uniform Mesh Grid in Random selection- Montecarlo Approximation error is (Barron) Approximation error is Montecarlo overcomes NP-complexity problems!
ASIDE- Useful for reducing complexity of fuzzy logic systems? Uniform grid of Separable Gaussian activation functions for RBF NN
Algorithm and Proofs work for any Q(x) in Constrained input given by CONSTRAINED STATE CONTROL k large and even MINIMUM-TIME CONTROL For small R and this is approx.
Region of asymptotic stability for the nearly optimal controller,