Download
1 / 12
120 likes | 235 Views
Extending the Timing Definition Language with High Priority Interrupts. Software & Systems Research Center (SRC) University of Salzburg Peter Hintenaus, Patricia Derler, Wolfgang Pree, Josef Templ Synchron 09. Background. Deeply Embedded Hardware (Board Level) Embedded Software.

E N D
Extending the Timing Definition Language with High Priority Interrupts Software & Systems Research Center (SRC) University of Salzburg Peter Hintenaus, Patricia Derler, Wolfgang Pree, Josef Templ Synchron 09
Background • Deeply Embedded Hardware (Board Level) • Embedded Software
Timing Definition Language Based on Giotto [Henzinger, Kirsch] Logical Execution Time (LET) Semantics Multiple modes WCET required terminate Logical Execution Time (LET) Logical task invocation time Physical start suspend resume stop (ET) stop (WCET)
Timing Definition Language: Transparent Distribution communicationwindow communicationwindow Local execution and bus have to be synchronized! 5 ms Sender t inc inc inc inc ECU1 stop (WCET) stop (WCET) Receiver clientTask clientTask ECU2 10 ms
Timing Definition Language: Asynchronous Extension Asynchronous Tasks triggered by • Interrupts • Input Port Updates No timing guaranties for asynchronous tasks Implemented using interrupt service routines a registry and lock-free synchronization Mode Start Mode End Mode Period Logical task invoc. 1 task invoc. 2 time Physical
Flexray @ 1kHz Control @ 15kHz M Several Timing Domains Need to be able to specify timing domain! +
Asynchronous Events I Sampling • Fixed Interval • Well behaved • Guaranties • Costly when fast reactions required Polling • Check whenever convenient • Well behaved • Cheap • No guaranties
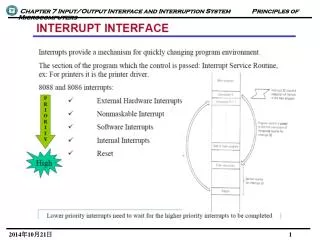
Asynchronous Events II Interrupts • Very fast reaction possible • Together with timer hardware precise and robust timing possible • Extremely hard to harness
Interrupts I Precisely timed execution scheduled at the beginning of the LET of a synchronous task Mode Start Mode End Mode Period task invoc. 1 task invoc. 2 time Interrupt Interrupt • Deadline • Maximum delay?
Interrupts II Event originating in another timing domain • Deadline • Minimum interarrival time
Impact on Synchronous Tasks Specify • LET • Rate • Start within mode period • Jitter
Open Work / Questions • Language extensions • Can this have a reasonable semantics? • Is transparent distribution possible with asynchronous networks? • Is this powerful enough for cost sensitive, deeply embedded applications? • Sample applications, e.g. make PMSM turn, both in simulation and reality