Download
1 / 1
10 likes | 171 Views
Decoupled Visual Servoing From a Set of Points Imaged by an Omnidirectional Camera. H. Hadj-Abdelkader*, Y. Mezouar*, and P. Martinet* # * LASMEA-UMR 6602 du CNRS # ISRC-Intelligent Systems Research Center 24, avenue des Landais Sungkyunkwan University

E N D
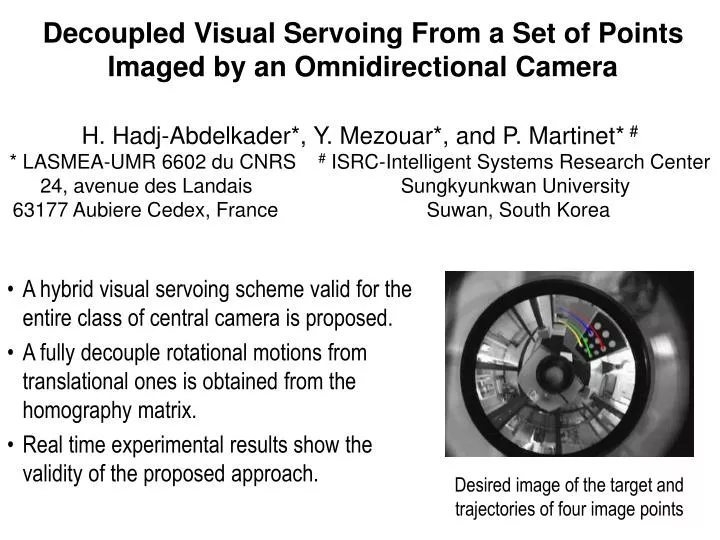
Decoupled Visual Servoing From a Set of Points Imaged by an Omnidirectional Camera H. Hadj-Abdelkader*, Y. Mezouar*, and P. Martinet* #* LASMEA-UMR 6602 du CNRS # ISRC-Intelligent Systems Research Center 24, avenue des Landais Sungkyunkwan University 63177 Aubiere Cedex, France Suwan, South Korea • A hybrid visual servoing scheme valid for the entire class of central camera is proposed. • A fully decouple rotational motions from translational ones is obtained from the homography matrix. • Real time experimental results show the validity of the proposed approach. Desired image of the target and trajectories of four image points