Download
1 / 19
190 likes | 398 Views
Active magnetic attitude control system providing three-axis inertial attitude. M. Ovchinnikov, V. Penkov , D. Roldugin , A. Guerman Keldysh Institute of Applied Mathematics of RAS University of Beira Interior. Contents. Main goal Problem statement Geomagnetic field vectors

E N D
Active magnetic attitude control system providing three-axis inertial attitude M. Ovchinnikov, V. Penkov, D. Roldugin, A. Guerman Keldysh Institute of Applied Mathematics of RAS University of Beira Interior
Contents • Main goal • Problem statement • Geomagnetic field vectors • Analysis methods • Analysis • Fast and moderate rotations • Slow rotation without gravity • Optimal control gains • Gravity influence • Conclusion 2nd IAA Conference on Dynamics and Control of Space Systems
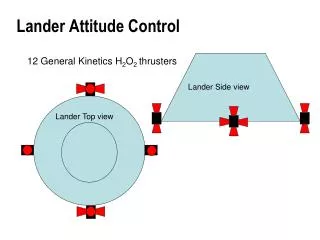
Main goal • To overcome two principal MACS problems • Underactuation, that is the torque is perpendicular to the geomagnetic induction vector • Torque value limit due to the limited power and dimension capabilities • To assess gravity effect on the inertial attitude 2nd IAA Conference on Dynamics and Control of Space Systems
Problem statement • Euler and osculating equations are used • Satellite is equipped with three magnetorquers • Attitude is known • Control torque or control and gravitational torques are taken into account • Orbit is a Keplerian one • Averaged and IGRF models are used • Control torque is based on the PD-controller 2nd IAA Conference on Dynamics and Control of Space Systems
Geomagnetic field models • Averaged: Geomagnetic induction vector evenly rotates on the cone surface • IGRF 2nd IAA Conference on Dynamics and Control of Space Systems
Analysis methods • System in arbitrary motion is often analyzed using numerical methods. Not enough assumptions can be made to simplify the system • Floquet theory Transient motion Multiple scales method Arbitrary motion Numerical analysis Steady-state motion Poincare method 2nd IAA Conference on Dynamics and Control of Space Systems
Fast/moderate rotation • Control gains are comparable • Mean influence of the positional control part and gravitational torque is equal to zero • The control is identical to the “-Bdot” one and to the eddy currents • The angular velocity is exponentially damped to the orbital velocity value 2nd IAA Conference on Dynamics and Control of Space Systems
Slow rotation. Averaged equations • Averaged linearized equations without gravity • Damped oscillations for each angle • Linearized averaged equations are asymptotically stable, so initial equations allow asymptotically stable limit cycle. The solution is in the vicinity of the averaged equations equilibrium, so the averaging is valid on the unlimited time interval 2nd IAA Conference on Dynamics and Control of Space Systems
Control gains 2nd IAA Conference on Dynamics and Control of Space Systems
Floquet theory: more accurate results 2nd IAA Conference on Dynamics and Control of Space Systems
Poincare method: damping effect • Three-axis control with gravity, orbital plane motion • Oscillations without damping • Damping-driven modulus change for discrete frequency values • Approximate solution 2nd IAA Conference on Dynamics and Control of Space Systems
Periodic solutions • Periodic solutions are found numerically • Approximate formulas for the amplitude depending on satellite parameters are found • Simple formula may be used in the vicinity of necessary attitude 2nd IAA Conference on Dynamics and Control of Space Systems
Floquet theory: stability area change 2nd IAA Conference on Dynamics and Control of Space Systems
Floquet theory: stability area change 2nd IAA Conference on Dynamics and Control of Space Systems
Floquet theory: stability area change 2nd IAA Conference on Dynamics and Control of Space Systems
Floquet theory: stability area change 2nd IAA Conference on Dynamics and Control of Space Systems
Periodic solutions amplitude 2nd IAA Conference on Dynamics and Control of Space Systems
Results • Three-axis attitude is proven to be accessible • Simple formulas for optimal control gains are found • More accurate Floquet-based optimal parameters are found • Gravity effect is found to be controversial, acting as control or disturbing torque in general 2nd IAA Conference on Dynamics and Control of Space Systems
Acknowledgment The work was supported by RFBR grants №№ 12-01-33045, 13-01-00665, 14-01-31313 project Odyssea 2nd IAA Conference on Dynamics and Control of Space Systems