Download
1 / 14
140 likes | 162 Views
Wall Climber Project . Kevin Kauffman Eric Hall. Objectives. Remotely control the climber, with visual feedback Remote driving Camera functionality Feedback communication Variable Motor Speed. Previous Work . Most of the individual devices were inherited Working, connected servomotors

E N D
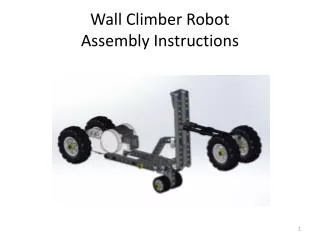
Wall Climber Project Kevin Kauffman Eric Hall
Objectives • Remotely control the climber, with visual feedback • Remote driving • Camera functionality • Feedback communication • Variable Motor Speed
Previous Work • Most of the individual devices were inherited • Working, connected servomotors • A large tangle of wiring
Approach • One component at a time • Controlled Motion • Camera functionality and overlay • Remote control • Central Motor functionality • Variable Motor speed • Camera feedback
Receiver • Receives on 7 channels • Gets VCC and ground from the inputs • Outputs Signal on third pin • PWM signal from 1 to 2 ms
Motor Drivers • Each pair of wheels has a component • Takes PWM signal from receiver and controls motor • Vregs step down voltage
Central Motor • Pixie 20 takes PWM signal and outputs to motor • Motor driven directly of 22v rails • Wanted to drive off dial, but signal did not correspond correctly • Must cut power line to receiver to avoid short circuit
Imaging Camera Transmitter Overlay Battery Monitor Screen Receiver
Battery Monitor • Inputs power rails and outputs to the overlay • Circuitry can be rearranged to also monitor current and motor RPM • Can be configured to be activated by a switch on the controller
Overlay • Eagle Tree OSD • Inputs video source and telemetry data • Outputs to video transmitter
Main Costs • Futaba 7C R/C System $280.00 • Eagle Tree Video OSD $80.99 • Eagle Tree Elogger $69.99 • LM 500mW Transmitter $49.50 • 2.4 GHz Receiver ~$50.00 • Total >$530.48
Timeline • 10/18: introduced to robot, not working, most parts disconnected • 11/1: climber can drive around and video overlay works • 11/22: video link working, pixie received • 11/28: Pixie working when not attached to dial • 12/4: system integrated
Work Assessment • Car motion can be controlled remotely • 1 camera image is sent back with some interference • Central Motor can be controlled remotely
Potential Future Work • Fix interference of image (new transmitter/receiver pair) • Move VRAM control to a dial instead of switch • Image switching