Download
1 / 26
260 likes | 394 Views
Real-Time ROMS Ensembles and adaptive sampling guidance during ASAP. Sharanya J. Majumdar RSMAS/University of Miami Collaborators: Y. Chao, Z. Li, J. Farrara, P. Li, P. Lermusiaux, C. Bishop ASAP Hot Wash, 11/1/06-11/3/06. Why Use Ensembles?. To quantify uncertainty in flow

E N D
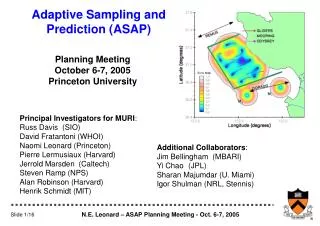
Real-Time ROMS Ensembles and adaptive sampling guidance during ASAP Sharanya J. Majumdar RSMAS/University of Miami Collaborators: Y. Chao, Z. Li, J. Farrara, P. Li, P. Lermusiaux, C. Bishop ASAP Hot Wash, 11/1/06-11/3/06
Why Use Ensembles? • To quantify uncertainty in flow • Degree of confidence in prediction • Probabilistic forecast • Adaptive Sampling • Use ensemble-based error statistics to predict locations in which extra sampling is required • Data Assimilation • Flow-dependent error covariance matrix • Synoptic and Sensitivity Analysis
Progress Prior to ASAP • Software developed at JPL to produce ensembles of 3-nested ROMS • Atmospheric wind stress perturbations • Oceanic initial condition perturbations (breeding) • What we learned (2003-5) • 3-nested ROMS cumbersome (7 forecasts per day) • Realistic atmospheric perturbations produce minimal change in 48-hour ROMS forecast • Higher sensitivity to initial ocean conditions
ROMS ensembles in ASAP • Goal: to provide automated real-time daily ensembles and adaptive sampling guidance • Single-domain ROMS • 1.67km resolution • Lateral boundary conditions provided by average of operational 3-nested ROMS forecast • No atmospheric wind stress perturbations • Initial condition perturbations produced by ‘breeding’ technique • 32-member ensemble
1-day ROMS ensemble forecast from previous day Forecast perturbations Rescale to yield Analysis Perturbations ROMS Analysis and Forecast New initial ensemble 2-day COAMPS wind forecast 2-day ROMS ensemble forecast Post-process ensemble Variance and ETKF data files and graphics uploaded to OurOcean ETKF adaptive sampling
Timeline • 29 July-10 Aug: added new ensemble members. • 13 Aug-13 Sep: Daily 32-member ROMS ensembles available by 9am PDT on http://ourocean.jpl.nasa.gov/MB06/ • Fully automated.
Ensemble Variance • Prediction of ‘uncertainty’ in a forecast. • Next few slides show 48-h forecast mean and variance fields for ensembles initialized between 22-28 August 2006.
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
0m T 0m S 0m u 0m v
Ensemble Transform Kalman Filter (ETKF) adaptive sampling Q: In what location should we collect and assimilate extra observational data, in order to improve an X-hour forecast? (X=0,24) Ensemble Initialization time Adaptive Sampling time Forecast time tv ti to t 24 hours 24 hours
Review of Performance • Automation and timely delivery worked well. • Variance and adaptive sampling guidance seemed qualitatively reasonable. • Cut corners: no perturbations in lateral boundary conditions, wind stress, heat flux etc.
The Future: Short Term • Re-run ROMS ensemble for 2003 and 2006 • Using new ROMS reanalysis • Stable analysis error variance? • Is ensemble variance a good predictor of forecast error? • Evaluate ETKF adaptive sampling • Qualitative evaluation of sensitive areas • Quantitative evaluation of whether ETKF can predict reduction in forecast error variance (using ROMS data denial)
Papers to be completed • ROMS ensembles: AOSN-II and ASAP • ETKF adaptive sampling, interpretation and evaluation of guidance • Adaptive sampling review, comparison of ESSE and ETKF • Response of ocean model to changes in atmospheric forcing
The Future: Long Term • Observing System Simulation Experiments • Couple adaptive sampling guidance to AUV survey error metrics (Zhang/Bellingham) • Test hypothetical configurations of glider arrays (Leonard, Lermusiaux) • Work with REMUS AUV (Moline)