Download
1 / 1
10 likes | 133 Views
Crowd Counting by Estimation of Texture Repetition Cody Seibert, Imran Saleemi ( cody_seibert@knights.ucf.edu , imran@eecs.ucf.edu) University of Central Florida. 1. Problem Count the number of people in an image of a crowd Difficulties High occlusion Low resolution

E N D
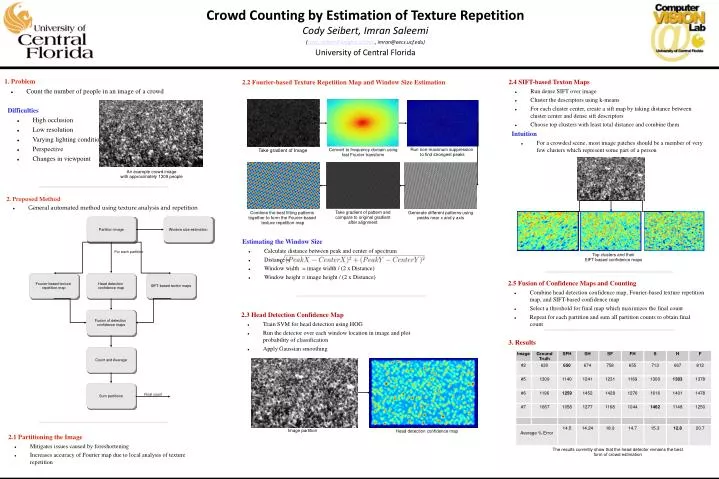
Crowd Counting by Estimation of Texture RepetitionCody Seibert, Imran Saleemi (cody_seibert@knights.ucf.edu, imran@eecs.ucf.edu) University of Central Florida 1. Problem • Count the number of people in an image of a crowd Difficulties • High occlusion • Low resolution • Varying lighting conditions • Perspective • Changes in viewpoint • 2.4 SIFT-based Texton Maps • Run dense SIFT over image • Cluster the descriptors using k-means • For each cluster center, create a sift map by taking distance between cluster center and dense sift descriptors • Choose top clusters with least total distance and combine them Intuition • For a crowded scene, most image patches should be a member of very few clusters which represent some part of a person 2.2 Fourier-based Texture Repetition Map and Window Size Estimation Run non-maximum suppression to find strongest peaks Convert to frequency domain using fast Fourier transform Take gradient of Image An example crowd image with approximately 1309 people • 2. Proposed Method • General automated method using texture analysis and repetition Take gradient of pattern and compare to original gradient after alignment Generate different patterns using peaks near x and y axis Combine the best fitting patterns together to form the Fourier-based texture repetition map Partition Image Window size estimation • Estimating the Window Size • Calculate distance between peak and center of spectrum • Distance = • Window width = image width / (2 x Distance) • Window height = image height / (2 x Distance) For each partition Top clusters and their SIFT-based confidence maps Fourier-based texture repetition map Head detection confidence map SIFT-based texton maps • 2.5 Fusion of Confidence Maps and Counting • Combine head detection confidence map, Fourier-based texture repetition map, and SIFT-based confidence map • Select a threshold for final map which maximizes the final count • Repeat for each partition and sum all partition counts to obtain final count Fusion of detection confidence maps • 2.3 Head Detection Confidence Map • Train SVM for head detection using HOG • Run the detector over each window location in image and plot probability of classification • Apply Gaussian smoothing 3. Results Count and Average Sum partitions Final count Image partition Head detection confidence map • 2.1 Partitioning the Image • Mitigates issues caused by foreshortening • Increases accuracy of Fourier map due to local analysis of texture repetition The results currently show that the head detector remains the best form of crowd estimation