Download
1 / 32
350 likes | 542 Views
A Log-Euclidean Polyaffine Framework for Locally Rigid or Affine Registration. Vincent ARSIGNY. Why locally rigid or affine deformations?. Well-adapted to certain situations: histological slices [Pitiot, MedIA, 2005] articulated structures [Papademitris, Miccai’05]

E N D
A Log-Euclidean Polyaffine Framework for Locally Rigid or Affine Registration Vincent ARSIGNY.
Why locally rigid or affine deformations? • Well-adapted to certain situations: • histological slices [Pitiot, MedIA, 2005] • articulated structures [Papademitris, Miccai’05] • After global alignment, allow finer registration with very smooth deformations. Alternatives: • B-Splines [Rueckert, TMI, 99] • RBFs [Rohde, TMI, 2003] • Vortex particules [Cuzol, IPMI’05] • Etc.
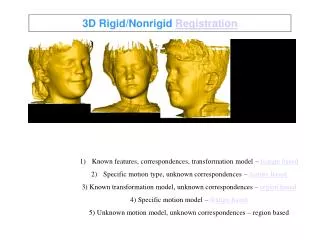
Example: Head and Neck Reference image Resampled floating image Images obtained with SuperBaloo algorithm. Thanks Olivier.
Overview • Presentation • (Previous) Polyaffine framework • Log-Euclidean Polyaffine framework • 3D Registration Results
( ( ) ( ) ) T T M 0 t > w x w = i i i i i i ; ; Locally Rigid or AffineDeformations • Parameters: N rigid or affine components where: • : rigid or affine transformations • : weights, modeling spatial influence/anchoring or components. • Example:
( ) P ( ) ( ) T T x w x x = i i i : Locally Affine Deformations • Direct fusion into global deformations(with normalized weights): • Advange: simplicity, smoothness • Drawback: non-invertibilityin general
P ( ) ( ( ) ( ) ) [ ] l f M _ 0 1 t t + ¡ 2 x w x o g x s o r s = i i i i i : ; : M i Polyaffine Framework • Idea: use infinitesimal fusion,via integration of an ODE during 1 unit of time. • How? In [Arsigny, MedIA,05], [Arsigny, Miccai’03]: • Use logarithms of linear parts • ODE: Vincent Arsigny, Xavier Pennec, and Nicholas Ayache. Polyrigid and Polyaffine Transformations: A Novel Geometrical Tool to Deal with Non-Rigid Deformations - Application to the registration of histological slices. Medical Image Analysis, 9(6):507-523, December 2005.
Overview • Presentation • (Previous) Polyaffine framework • Log-Euclidean Polyaffine framework • 3D Registration Results
Why a Novel Polyaffine Framework? • Previous framework has severaldefects: • Inverse of polyaffine transformation not polyaffine • Fusion: depends on the coordinate system(not affine-invariant) • ODE integration: high computational cost.
µ ¶ µ ¶ M L t v ( ) l l T d f o g e o g = = P ( ) ( ) ( ) l V T : _ 0 1 0 0 x x w x o g x = = i i i : Log-Euclidean Framework • Novel framework: [Arsigny,WBIR’06], INRIA research report pending. • Idea: use logarithms of transformations(vs. only linear parts previously) • New polyaffine ODE (homog. coord.): Vincent Arsigny, Olivier Commowick, Xavier Pennec, and Nicholas Ayache. A Log-Euclidean Polyaffine Framework for Locally Rigid or Affine Registration.In Proc. of WBIR’06 (to appear).
Log-Euclidean Framework • Remarkable novel properties: • ODE is stationary (or autonomous) • Integration of ODE: yields one-parameter subgroup of LEPTs • In particular: inverse (or square root):is a LEPT with identical weightsand inversed (or square rooted) transfos • affine-invariance
( P ( ) ) l T T e x p w o g = i i i Log-Euclidean Framework • Why called Log-Euclidean? • Based on logarithms of transfos • If weights do not depend on x:Log-Euclidean mean of transfos: • Properties: geometric interpolation of determinants, inverse-invariance.
N M 2 ( ) ( ) M e x p e x p = N 2 Fast Polyaffine Transform (FPT) • Fast computation of LEPTs on regular grids possible, efficiency somehow comparable to FFT. • Idea: generalize ‘Scaling and Squaring’method for matrix exponential.Basic property:
Fast Polyaffine Transform • Integrating the ODE: • Integration time-step doubles ateach interation. • Scaling Step: choose N, so that V(x)/2^N is close enough to zero (depending on accuracy desired). • Exponentiation step: compute deformations at time 1/2^N with a numerical scheme. • Squaring step: small deformations squared recursively N times (N compositions of mappings) to obtain the LEPT
Fast Polyaffine Transform Typical example:
Fast Polyaffine Transform • Relative accuracy, 50x40 grid. • When N varies,convergencetoward: • Average error: 0.2 % • Error max: 2%
Inversion with the FPT Inversion of LEPTs: Just compute FPT with inverted transfos. Accuracy: 0.2%.
Fast Polyaffine Transform • In the following: used for post-processingof already estimated components. • Interest: • Singularities removed (vs. direct fusion) • Fast computation of inverse • No artifact introduced in fusion
Fast Polyaffine Transform Direct fusion LEPT fusion
Overview • Presentation • (Previous) Polyaffine framework • Log-Euclidean Polyaffine framework • 3D Registration Results
[ ] d k P C I S B I i i 0 6 t ² r e s e n e n o m m o w c , / ± d h b f i i i i t t t ² a n e r g c o m p o n e n s c o s e n e o r e r e g s r a o n h f d ¯ d k f f i i i i t t t t t t ² w e g u n c o n s e n e v a m a s s o s r u c u r e s o n e r e s l b l ± l ¯ i t t ² g o a a n e a g n e m e n r s l l f l i t t ² w o e v e s o r e s o u o n . b l k h h l i i i i 1 0 t t t t t ² o c - m a c n g e r a o n s a e a c r e s o u o n l l l l i i i i i i i t t t t ² s m a r y c r e r o n : o c a c o r r e a o n r a o d h d f h h d L T S i i i i i i t t t t t t t ² c o m p o n e n s e s m a e w r e c u s o n w w e g e , l l d l L E i i i i i t t t ² v s c o - e a s c o g - u c e a n r e g u a r z a o n s e p ( ) f f d F P T i i i 8 t t ² p o s - p r o c e s s n g : s q u a r n g s o r a n s o a n n v e r s e ( ) l l C P U i i i 1 0 8 2 0 0 2 0 0 2 0 0 t t t t < ² y p c a m e : m n u e s c o m p o n e n s x x v o x e s , Robust Block-Matching Algorithm Olivier Commowick, Vincent Arsigny, Jimena Costa, Nicholas Ayache, and Grégroire Malandain. An Efficient Locally Affine Framework for the Registration of Anatomical Structures. In Proc. of ISBI’06 (to appear).
Example: Head and Neck Reference image Resampled floating image
Brain Critical Structures Segmentation • Method: • Atlas-to-Subject registration • Affine component areas defined on the atlas • Apply transformation to contours
# P i 1 2 3 4 5 6 t t a e n ( ) S R i i i 0 8 8 0 8 6 0 8 4 0 7 9 0 8 5 0 7 8 t t e n s v y u n a . . . . . . ( ) ¯ S R i i 0 8 6 0 9 1 0 7 9 0 9 4 0 8 9 0 9 1 t p e c c y u n a . . . . . . ( ) ( ) D R i 1 1 0 1 9 0 1 7 0 2 7 0 2 2 0 1 9 0 2 4 t t s a n c e o u n a , . . . . . . ( ) S M A F i i i 0 8 6 0 8 5 0 8 2 0 8 4 0 8 4 0 7 6 t t e n s v y . . . . . . ( ) ¯ S M A F i i 0 8 9 0 9 1 0 8 3 0 9 2 0 9 0 0 9 3 t p e c c y . . . . . . ( ) ( ) D M A F i 1 1 0 1 8 0 1 7 0 2 5 0 1 8 0 1 9 0 2 5 t t s a n c e o , . . . . . . ( ) b l i i l b i h d h d R T R i 1 t t t t t t e g s r a o n r e s u s o n r a n s e m a e : w e n s e m e o u n a [ ] h d d l l l ± d ¯ b S M I A S i i i i i 2 0 0 5 t t t t e p a n e s c u e a n o c a y a n e e n s v y a n s p e c c y o - , , . d l h h S T A P L E i i i t t t t a n e : a g o r m w s e v e n e x p e r s , Results on Brain Structures Segmentation → Comparable accuracy, locally affine much smoother.
Conclusions • Current locally-affine framework: • Well-adapted in a number of situations • Efficient estimation of local deformations(vs. [Arsigny, MedIA,05]) • Invertibility of global deformations and intuitive properties of fusion:Log-Euclidean polyaffine framework • Efficient computation of global transformationas well as inverse: FPT
Perspectives • Estimation of geometry components:ideas of [Pitiot, MedIA,05] to integrate,necessary for histology in particular. • Statistics on deformabilityin low-dimensional spaces (vs. dense deformations),easier to embed in registration? • Locally rigid/affine deformations between global alignment and dense deformations?Goal: comparable or better accuracy with smoother deformations
Any questions? Thank you for your attention!