Download
1 / 34
340 likes | 456 Views
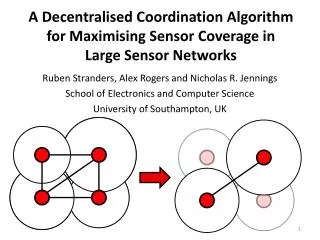
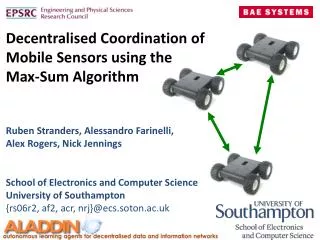
A Decentralised Coordination Algorithm for Mobile Sensors. Ruben Stranders, Francesco Delle Fave, Alex Rogers, Nick Jennings. School of Electronics and Computer Science University of Southampton {rs06r2, fmdf08r, acr, nrj}@ecs.soton.ac.uk.

E N D
A Decentralised Coordination Algorithm for Mobile Sensors Ruben Stranders, Francesco Delle Fave, Alex Rogers, Nick Jennings School of Electronics and Computer Science University of Southampton {rs06r2, fmdf08r, acr, nrj}@ecs.soton.ac.uk
This presentation focuses on coordinating mobile sensors for information gathering tasks Decentralised Control using Max-Sum Problem Formulation Model Value Coordinate Sensor Architecture
The key challenge is to coordinate a team of sensors to gather information about some features of an environment Sensors • Feature: • moving target • spatial phenomena (e.g. temperature) (previous work)
We focus on two well known information gathering domains: (1) Pursuit Evasion
We focus on two well known information gathering domains: (2) Patrolling
The sensors operate in a constrained environment • No centralised control
The sensors operate in a constrained environment • Limited • Communication
The aim of the sensors is to collectively maximise the value of the observations they take Paths leading to areas already explored - Low value
The aim of the sensors is to collectively maximise the value of the observations they take Paths leading to unexplored areas - High value
The aim of the sensors is to collectively maximise the value of the observations they take As a result, the target is detected faster
To solve this coordination problem, we had to address three challenges How to modelthe problem? How to value potential samples? How to coordinateto gather samples of highest value?
The three central challenges are clearly reflected in the architecture of our sensing agents Incoming negotiation messages Sensing Agent Samples received from neighbouring agents Value of potential samples Information processing Samples from own sensor Model Value Model of Environment Action Selection Coordinate Move Raw samples Outgoing negotiation messages Samples sent to neighbouring agents
Incoming negotiation messages Sensing Agent Samples received from neighbouring agents Value of potential samples Information processing Samples from own sensor Model of Environment Action Selection Move Raw samples Model Outgoing negotiation messages Samples sent to neighbouring agents
Each sensor builds its own belief map containing all the information gathered about the target Map of the probability distribution over the target’s position The map is dynamically updated by fusing the new observation gathered
Incoming negotiation messages Sensing Agent Samples received from neighbouring agents Value of potential samples Information processing Samples from own sensor Model of Environment Action Selection Move Raw samples Value Outgoing negotiation messages Samples sent to neighbouring agents
We value a set of observations by measuring how much they reduce the probability of detecting the target High probability High value: - target might be there Low probability • Low value: • Target is probably somewhere else
The sensor agents coordinate using the Max-Sum algorithm Incoming negotiation messages Sensing Agent Samples received from neighbouring agents Value of potential samples Information processing Samples from own sensor Model of Environment Action Selection Move Raw samples Coordinate Outgoing negotiation messages Samples sent to neighbouring agents
To decompose the utility function we use the concept of incremental utility value
The key problem is to maximise the social welfare of the team of sensors in a decentralised way Mobile Sensors Social welfare:
The key problem is to maximise the social welfare of the team of sensors in a decentralised way Variable encode paths
Coordinating over all paths is infeasible: it results in a combinatorial explosion for increasing path length Variable encode paths
Our solution: we cluster the neighborhood of each sensor Clusters (now each variable represent a path to the Center of each cluster) Most informative is chosen!
We can now use Max-Sum to solve the social welfare maximisation problem Optimality Complete Algorithms DPOP OptAPO ADOPT Max-Sum Algorithm Iterative Algorithms Best Response (BR) Distributed Stochastic Algorithm (DSA) Fictitious Play (FP) Communication Cost
The input for the Max-Sum algorithm is a graphical representation of the problem: a Factor Graph Variable nodes Function nodes Agent 3 Agent 1 Agent 2
Max-Sum solves the social welfare maximisation problem by local computation and message passing Variable nodes Function nodes Agent 3 Agent 1 Agent 2
Max-Sum solves the social welfare maximisation problem by local computation and message passing From variable i to function j • From function j to variable i
To use Max-Sum, we encode the mobile sensor coordination problem as a factor graph Sensor 1 Sensor 2 Sensor 3 Sensor 1 Sensor 2 Sensor 3
To use Max-Sum, we encode the mobile sensor coordination problem as a factor graph Sensor 1 Sensor 2 Paths to the most informative positions Sensor 3 Sensor 1 Sensor 2 Sensor 3
To use Max-Sum, we encode the mobile sensor coordination problem as a factor graph Sensor 1 • Local Utility Functions • Measure value of observations along paths Sensor 2 Sensor 3 Sensor 1 Sensor 2 Sensor 3
Our Algorithm outperforms state-of-the-art approaches by up to 52% for Pursuit Evasion
Our Algorithm outperforms state-of-the-art approaches by up to 44% for Patrolling
In conclusion, we show that our algorithm is effective for a broad range of information gathering problems • 1. Decentralised 3. Effective 2. General
For future work, we wish to extend our approach to compute solutions with a guaranteed approximation ratio for any planning horizon
In conclusion, we show that our algorithm is effective for a broad range of information gathering problems • 1. Decentralised 3. Effective QUESTIONS? 2. General