Download
1 / 24
240 likes | 380 Views
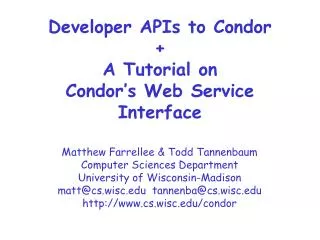
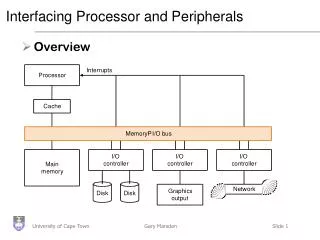
Summary of discussions held with M.E. Angoletta, P. Baudrenghien, C . Carli, M. Chanel, A. Findlay, F. Pedersen. PSB – Linac 4 Interfacing. Interfacing scheme under discussion Not yet finalized !. 2 μ s. Equipment to be synchronized. Pre-chopper +LEBT. Debuncher. RF Feedforward.

E N D
Summary of discussions held with M.E. Angoletta, P. Baudrenghien, C. Carli, M. Chanel, A. Findlay, F. Pedersen PSB – Linac 4 Interfacing Interfacing scheme under discussion Not yet finalized ! IRF meeting 24/06/2009
2μs Equipment to be synchronized Pre-chopper +LEBT Debuncher RF Feedforward Distri 4*rf From F. Gerigk 180 m Source 45 keV Chopper Amplitude modulated for energy modulation (painting) from P. Baudrenghien • RF feed-forward, energy modulator, debuncher, distributor and rf have to be in phase with the Chopper IRF meeting 24/06/2009
Our Quantum: • the L4 bunch • 1.15 * 109 protons (65mA) • TRF = 2.84 ns • DE = 120 keV (1s) Goal:Fill - as required - the PSB phase space area + 1 MeV Aperture of the L4 transfer line (max bucket height = +/-1.25 MeV) - 1 MeV • Hardware limitations: • Energy modulation slew-rate (last 2 PIM cells): 0.2 MeV/ms • Minimum Chopper TBeam-OFF = 30 ns? • Chopper repetition rate < 1 MHz? IRF meeting 24/06/2009
Actual bucket filling sketch Longitudinal painting L4 beam energy IRF meeting 24/06/2009
The pre-chopper at 45 keV is in the beam OFF position, Distributor is in the Head dump position. Source, L4 rf and PSB rf are driven to their nominal value Pre-chopper set to Beam-ON (20μs = rise time 1-2μs + LEBT space charge compensation)and Chopper set to beam-OFF After 20 μs, Chopper set to beam-ON for the launching of the first beam synchronously with the distributor targeting the first ring to be injected Chopper activated to fill the rf buckets only Chopper in Beam-OFF position during the distributor transition (500 ns?) Distributor targeting the tail dump, Pre-chopper in beam-OFF state (20 μs rise time) Chopper in beam OFF state for 20 μs, Distributor back to the Head Dump position N.B.: With the fast beam chopping at low energy, the Tail Dump is not necessary! Typical sequence IRF meeting 24/06/2009
Extreme beam types LHC pilot beam: 0.05* 1011 p = 43 L4 bunches = 0.12 PSB revolution ISOLDE beam: 2* 1013 p = 17.4 k L4 bunches = 49.2 us of 65mA Linac beam = 74 PSB revolutions with an average bucket filling duty cycle of 2/3 IRF meeting 24/06/2009
PSB injection practical values IRF meeting 24/06/2009
For an accurate injection process, B, fRF and φRF need to be well known. • Due the response time of the different interveners, and due to the flight time between Chopper and Ring ( 2μs), they also need to be known in advance (no possible feedback within the limited injection duration) • All rings will wait for the beam at the same initial frequency. • The BdL correctors will be set such as to create a ring to ring field difference depending on dB/dt and number of turns injected per ring such that the field at the time of the first turn injected is equal in all rings (Bdot compensation). • After the start of the injection, from this initial rf frequency and during the entire injection process, each ring has the possibility to follow an independent frequency law. This frequency law will be pre-determined! • The phase of the rf in all rings and during the entire injection process will be pre-determined with an acceptable accuracy (1 revolution degree). This requires a revolution reference , an injection synchronization and a predictable frequency program. Preliminary considerations IRF meeting 24/06/2009
The foreseen PSB Beam Control is activated at the pace of a 200 kHz clock (every 5μs). This interrupt clock or “fast-loop-clock” is asynchronous w.r.t. the injection process. • The rf doesn’t change in between 2 “fast-loop-clock” tics - period corresponding to 5 injected turns. • For a perfect tracking of the rf frequency change, the “fast-loop-clock” should be in phase with the injection process. Evolution of the rf bucket phase during injection • The frequency increase (ΔR =0) during injection creates a parabolic revolution phase deviation from the initial reference of 6.82o after 100turns (1.7o after 50 turns) and cannot be ignored. • The phase error caused by the step-by-step frequency program compared with the linear increase is < 54 mo and can be thus ignored. • The phase error due to the 5μs jitter in the DSP generated frequency program < 1.33o after 100 turns (acceptable) Averaged Frequency Frequency Updated every 5 μs • 379 Hz 100 μs IRF meeting 24/06/2009
Injection at a fixed frequency (100 turns injected) Ramping-up actually slower than shown IRF meeting 24/06/2009
Injection in an accelerating bucket (100 turns injected) Ramping-up actually slower than shown IRF meeting 24/06/2009
Summary concerning the PSB rf at injection Rf synchronized to a single reference (h1 or h2) The reference will be provided by an independent CO source. Position of rf buckets predictable (enough) along the entire injection process Rf of each individual ring set to a convenient initial phase - takes into account the possible acceleration in the previously injected ring and the distributor rise time. Each ring will receive a start Injection pulse (+ end injection ?) IRF meeting 24/06/2009
The role of the chopper is to inhibit the beam in these different cases: During the pre-chopper switching duration (20μs = rise time 1-2μs + LEBT space charge compensation) When the distributor is in the head or tail dump position During the switching duration of the distributor (<500 ns?) During the PSB injection process when the beam is out of the bucket During the PSB injection process within a bucket, when the beam density is required to be low (low duty cycle filling) or for bunch shaping (hollow distribution). Chopper requirements (1/3) IRF meeting 24/06/2009
The chopper firing time is a function of: • rf bucket position in each individual ring • Distributor timing (number of turns) and its rise time • L4 energy modulation (flight time change = +/- 3.4 ns over the 180 m separating PIMS and PSB injection Foil ) • Distributor position (negligible flight time change < 0.6 ns) • Expected rf bucket filling pattern • Chopper hardware limitations • TBeam-OFF > 30 ns? • Repetition rate < 1 MHz? Chopper requirements (2/3) IRF meeting 24/06/2009
To be asked for (?): • Maximum beam-OFF > 20 μs (pre-chopper rise time) • Minimum beam-ON < 4 Linac bunches = 11 ns ? (spec to be defined) • Minimum beam-OFF < 4 Linac Bunches = 11 ns ? (spec to be defined) • Synchronous with the L4 bunches (reproducible result: 4 bunches required doesn’t mean 4 +/- 1) • Rise time < 2ns (L4 inter-bunch spacing) Chopper requirements (3/3) IRF meeting 24/06/2009
Under discussion Detailed Chopper timing N.B: A Start Injection pulse is required for each injection in each Beam Control; a stop injection pulse may also be required? IRF meeting 24/06/2009
Under discussion • The fast rf train is aimed at creating events within a revolution period • The events are the following: • L4 energy modulation • Debuncher phase (debuncher position: 20 m? after end of L4) • L4 beam chopping • The fast rf train is either synchronous with the L4 rf or not. • If it is a (sub) multiple of the L4 rf, the chopping will be reproducible without a +/- 1 Linac bunch error for EACH micro-pulse (ex: the pilot beam is composed of 43 L4 bunches that could take the form of train of 10 micro pulses of 4 bunches, which would mean +/-10 bunches or 25% uncertainty). There might also be some radio activation issues with half kicked beam within the L4 structure. Selection of the fast clock 1/4 IRF meeting 24/06/2009
Under discussion In case the L4 rf is selected as the reference fast clock, the entire PSB injection (worst case 400 μs) would mean 140 k bunches or clock tics (18b counter) Selection of the fast clock 2/4 Timing Value Event Number IRF meeting 24/06/2009
Under discussion During the injection, the timing is critical. The beam is too energetic to be lost. The different timing tables should be well synchronized at the Control level, so that when a parameter change is programmed, the sequence of table reloading is well defined (to be checked with CO crew) Nevertheless, a security at the chopper control level could be installed to avoid losses due to a mis-programming. If receiving the distributor timing it could veto the beam during a transition or when the position is “dump”. Another way of avoiding losses even within a ring is to define the timing events within a revolution period (or a pre-determined number of revolutions) so as to avoid the possibility of error integration over the 400 μs of injection. Selection of the fast clock 3/4 IRF meeting 24/06/2009
Under discussion Some possible choices: PLL generating 512 or 1024 harmonic of PSB RF reference followed by L4 RF synchro: + no PSB RF period boundary problem as high frequency clock and PSB RF reference are synchronized. + no need to reprogram chopper tables when PSB RF injection reference frequency is changed - there is a L4 RF period jitter after resynchronisation to L4 RF, which cause a relatively large intensity jitter on short bunch trains Count L4 RF from a single PSB/L4 RF master timing reference: + no PSB RF period boundary problem + no intensity jitter for short bunch trains - need to re-compute chopper tables whenever a small change is done in L4 fRF (rare) or PSB fINJ REF (more frequent) and to make sure that these changed CCV's are changed simultaneously in two different FEC's. For each PSB turn, count L4 RF from beginning of each period of PSB RF master timing reference: + no need to re-compute chopper tables for small changes in CCV's of L4 fRF or PSB FINJ REF - PSB RF period boundary problem: there is an uncertainty of 1 L4 RF period concerning the number of counts within one period Selection of the fast clock 4/4 IRF meeting 24/06/2009
Under discussion From a unique start injection event, a revolution reference and a fast clock reference, the application defines: The sequence of beam ON-OFF along the entire injection (absolute fast clock tics or fast tics within a revolution) The energy modulation function (w.r.t. the fast clock and possibly the revolution ref) The debuncher phase function (w.r.t. the fast clock and possibly the revolution ref) The distributor timing (relatively to the revolution reference) The beam control timing (relatively to the revolution reference) The rf frequency law during injection (Δf per 5 μs) The BdL correction value Requirements for the application program 1/2 IRF meeting 24/06/2009
Under discussion • The input parameters will be: • number of turns injected • Pre-chopper timing • rf voltage and phase program for h1 and h2 • frequency law during injection • Type of bucket filling • Bdot at injection • Value of the injection reference frequency Requirements for the application program 2/2 IRF meeting 24/06/2009
Under discussion Debuncher Pre-chopper +LEBT Energy modulation Source Distri 4*rf Chopper Linac 4 L4 - PSB rf interfacing 180 m Beam OFF Window 45 keV Linac rf feed-forward Injection Sequencing control Voltage modulation Phase modulation L4 rf BIXi.SDIS Timing CO BIXi.SInjChop BIXi.SInjRF + ERF? Rev Inj. Ref Source h2 1/2 h1 SP2T Inj. rf reference (h1 or h2) ΔE Linac, Δφ debuncher Application BIXi.SDIS TON-OFF Chopper BIXi.RF_PHASE RF feed-forward IRF meeting 24/06/2009
The 4 PSB rf will be synchronized at injection to a ppm programmable CO type signal generator (Pentek). This signal will be the reference both for all the L4-PSB interveners. A fast reference clock (to be defined) will provide a reference to the chopper, modulator? and debuncher? The BdL correctors will be used to equalize the dipolar field in all rings during each individual capture process The Linac4 energy will be modulated to adapt to the acceleration during the capture process in each ring The debuncher phase will be modulated to adapt to the Linac4 energy modulation The chopper will be activated taking into account the flight time changes due to the Linac4 energy modulation, taking into account the ramping-up frequency during capture, taking into account the painting scheme and taking into account the switching particularities of the chopper amplifier (if need be?). The chopper will veto the beam during the distributor transition and when the destination is “head dump. An application will calculate all the timing values concerning the chopper, the distributor, the modulator and debuncher. A pick-up sum signal or a fast transformer signal issued from the 4 PSB individual injection lines need to be available for monitoring in the BOR as a diagnostic tool for all the upstream Linac4 system. The Tail dump is not useful anymore (to be communicated to the kicker people if accepted!?) Summary IRF meeting 24/06/2009