Download
1 / 6
60 likes | 89 Views
Unlock the world of Stereoscopic 3D right in your living room! Learn about the technology, shutter glasses, camera setups, and more to experience immersive 3D entertainment. Dive into the fascinating realm of creating stunning 3D images with cameras and TVs.

E N D
Stereoscopic 3D at Home Sheila Frederixon, Matt Gillett, Amy Gracik Stereoscopics is the technology that combines two separate images to create a 3D image. It is the most used form of 3D from Cinemas, to home theaters, and video games This is possible due to the fact that human eyes collect light independently from each other, thus the image we see is the combination of two 2D images.
Using Shutters to view Stereoscopic images. • Keys to Home Theater 3D • Video must be captured with two cameras or separated in complex computer renderings • The video is sent to the TV as two separate images that alternate at a rate of 240Hz. • The Liquid Crystal Shutter glasses close and open independently at 120hz in order to separate the observers image. • The glasses and TV alternate between left and right images together via an IR, or Bluetooth link • Your brain and eye can not operate quick enough to separate the two images, so they are combined into a Binocular 3D image (allows you to see depth)
How Shutter Glasses Work • Since the human eye operates between 48 and 60Hz (depending on study) • Shutter glasses manufacturers design the glasses to operate at 60Hz. • That is the lenses turn on and off in 1/60th of a second. • But when the lens is open for that 1/60th of a second the LCD lens is clear for • ½ and shaded for the other. There fore it acts more like 240Hz This is why you need a 240Hz TV in order to get a truly smooth 3D image. (See movie)
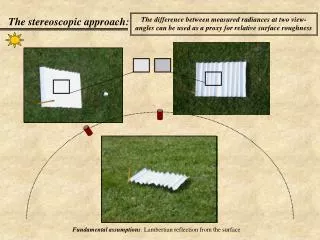
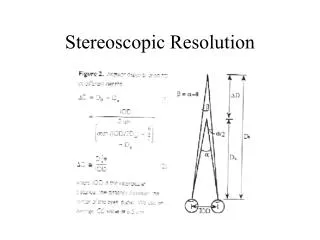
How to Develop a 3D image with Cameras These two equations represent the perspective position of two 2D points with respect to the 3D space point. A and A’ are 3x3 matrices that specify the intrinsic parameters of the first camera with respect to the second. Pn is a 3x4 matrix that normalizes the perspective projection. Here D represents a 4x4 matrix containing a rotation, R, and a translation, t. This transforms the 3D point from the real world coordinate system into a camera coordinate system. If we rearrange the first equation and make it dependent on the depth value Z, you get: If you then substitute the new equation into the second equation, you can find the depth dependent relation between the two perspective views and the same 3D scene.
When Creating a Stereoscopic Image On a stereoscopic 3D TV display there are two slightly different perspective views of a 3D scene. This means there is a slightly altered variant to the previous equations. There are still two cameras being used, however the difference lies in the part of the 3D scene that is going to be reproduced exactly on the display screen. This mathematically is done via shift-sensor approach. This is formulated as a displacement of the cameras principal point. This means that there is a horizontal shift of h, in the secondary camera In this case also, R=I, where I is the identity matrix. This lets simplifications be made to the original 3D imaging equation we found to become:
References • Fehn, Christopher. "Depth-Image-Based Rendering (DIBR), Compression and Transmission for a New Approach on 3D-TV." Fraunhofer-Institut FÄur Nachrichtentechnik, Heinrich-Hertz-Institute. Print. • Ozaktas, Haldun M, and Levent Onural. Three-dimensional Televison: Capture, Transmission, Display. Berlin: Springer, 2008. Print • http://www.youtube.com/watch?v=B9kHiJ2kvDQ&feature=channel “Why 120Hz is not enough”