Download
1 / 23
270 likes | 602 Views
Moti relativi. Nel trattare i moti bisogna definire il sistema di riferimento (SR) rispetto a cui si descrive il moto. A volte è più semplice usare un SR particolare (in moto rispetto ad un altro) ed è quindi opportuno poter passare dalla descrizione in un SR a quella di un altro SR.

E N D
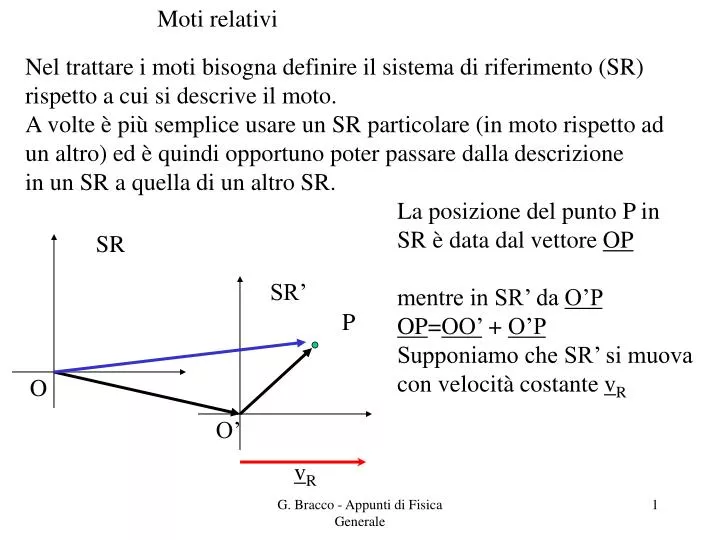
Moti relativi Nel trattare i moti bisogna definire il sistema di riferimento (SR) rispetto a cui si descrive il moto. A volte è più semplice usare un SR particolare (in moto rispetto ad un altro) ed è quindi opportuno poter passare dalla descrizione in un SR a quella di un altro SR. La posizione del punto P in SR è data dal vettore OP mentre in SR’ da O’P OP=OO’ + O’P Supponiamo che SR’ si muova con velocità costante vR SR SR’ P O O’ vR G. Bracco - Appunti di Fisica Generale
Ma vR= d(OO’)/dt e quindi d(OP)/dt= vR +d( O’P )/dt il primo termine rappresenta la velocità di P misurata in SR l’ultimo termine rappresenta la velocità di P misurata in SR’ vP= vR + v’P derivando ancora una volta (vR è costante) aP= a’P l’accelerazione e’ uguale nei due sistemi di riferimento Osservazioni: Nelle derivazioni abbiamo usato lo stesso tempo t ciò è valido per | vR | trascurabili rispetto alla velocità della luce altrimenti t t’ come vedremo in seguito. Se SR’ fosse in moto accelerato aP a’P G. Bracco - Appunti di Fisica Generale
Queste relazioni sono alla base delle Trasformazioni di Galileo Equazioni di trasformazione di Galileo (V = vR costante) r=r’ + V t’ V con velocità (di trascinamento) t=t’ di SR’ rispetto a SR La trasformazione inversa è data da r’=r - V t con lo scambio di V in -V t’=t Come si vede queste corrispondono a trasformazioni del sistema di riferimento per traslazione della quantità V t’. G. Bracco - Appunti di Fisica Generale
I sistemi di riferimento che si muovono di moto rettilineo uniforme rispetto agli altri hanno un ruolo particolare e vengono detti Sistemi inerziali In essi vale il principio di inerzia: Se un corpo non è soggetto ad azioni esterne mantiene inalterato il suo stato di quiete o di moto (cioè la sua velocità non cambia). Se un corpo non accelera in un sistema di riferimento e se anche in un secondo sistema si misura accelerazione nulla allora i sistemi devono essere in moto rettilineo uniforme uno rispetto all’altro. Quindi i due sistemi sono inerziali. Il principio di inerzia serve perciò a definire quali sono i sistemi inerziali. G. Bracco - Appunti di Fisica Generale
Azioni su un corpo Un corpo può modificare il suo stato di moto se vi è un’azione esterna che chiameremo forza F Newton collegò fra loro accelerazione di un corpo e forze (da questo la necessità di definire solo le quantità cinematiche posizione, spostamento, velocità e accelerazione) L’accelerazione impressa ad un corpo è direttamente proporzionale alla forza applicata al corpo (secondo Principio della Dinamica) a F (unità: newton, N) Questa relazione richiede perciò una costante di proporzionalità che chiameremo massa m (unità: chilogrammo, kg). F=ma secondo Principio della Dinamica (valido in SR inerziale) [F]=MLT-2 {F}=kg m s -2 =N G. Bracco - Appunti di Fisica Generale
La massa viene anche indicata con la quantità di materia posseduta da un corpo. A questo riguardo è opportuno definire la massa volumica (o densità) di un corpo che è una caratteristica del materiale che costituisce un corpo di volume V m = ------ (unità kg/m3) V dipende dalle condizioni ambientali in cui si trova il corpo (pressione, temperatura). A parità di esse, risulta uguale per ogni corpo omogeneo costituito dallo stesso materiale. Per un corpo di spessore trascurabile si può definire la densità superficiale = m/A (unità kg/m2) A=area del corpo, mentre per uno filiforme la densità lineare =m/l (unità kg/m) G. Bracco - Appunti di Fisica Generale
Azioni fra corpi diversi Stabilito che ogni azione corrisponde ad una forza, quando due corpi A e B interagiscono fra loro ci si può chiedere se solo B agisce su A od anche A risponde agendo con una forza su B. Newton trovò che esiste reciprocità ed enunciò il terzo principio Ad ogni azione corrisponde una reazione uguale e contraria quindi detta FB la forza che B applica ad A ed FA la forza che A applica su B, si può affermare che FA = -FB (ricordarsi che sono applicate a corpi differenti!) e hanno direzione comune (forze centrali) FB FA G. Bracco - Appunti di Fisica Generale
Tutta la meccanica classica discende da questi principi. Riassumiamoli perciò nei sistemi inerziali: 1) F=0 v= cost (Primo Principio, Principio di inerzia) 2) F 0 F= ma (Secondo principio della Dinamica) 3) FAB= -FBA (Terzo Principio, Principio di azione e reazione) Questi principi vengono anche chiamati leggi di Newton anche se il nome principio indica che tali relazioni sono frutto dell’esperienza, non dimostrabili da altre relazioni e sono il fondamento su cui si basa tutta la teoria della Meccanica Classica (corpi di dimensioni superiori a quelle atomiche e che si muovono a velocità piccole rispetto a quella della luce). G. Bracco - Appunti di Fisica Generale
E’ da osservare che se su un corpo agiscono più forze, la seconda legge di Newton va modificata considerando la somma di tutte le forze (risultante delle forze) F F=F1+ F2 +…+ Fn =jFj=ma Ciò esprime il principio di sovrapposizione delle forze che discende dalla loro natura vettoriale. Quando si scriveranno leggi che discendono dalla seconda legge di Newton si intenderà sempre la forza risultante anche se non esplicitamente detto. F3 F1 F4 F2 F1 G. Bracco - Appunti di Fisica Generale
Torniamo al nostro esempio x= (-0.31 t2+ 7.2 t+28) m y= (0.22 t2 - 9.1 t+30) m e calcoliamo la forza a cui è soggetto un corpo che segue quella traiettoria di m=2.0 kg. da F=ma occorre conoscere l’accelerazione at a a=(-0.62,0.44) m/s2 e quindi F=(-1.24,0.88) N E’ la sola forza applicata? ar G. Bracco - Appunti di Fisica Generale
Sistemi di riferimento non inerziali Le leggi di Newton valgono in riferimenti inerziali. Nei riferimenti non inerziali, il moto del riferimento introduce delle forze fittizie. Infatti prendiamo il caso di un riferimento SR’ che accelera rispetto a quello inerziale SR e ripetiamo il calcolo OP=OO’ + O’P deriviamo rispetto al tempo vP= vR + v’P derivando ancora aP= aR + a’P con aR l’accelerazione di SR’ rispetto a SR SR SR’ P O O’ aR G. Bracco - Appunti di Fisica Generale
Ma se ad ogni accelerazione corrisponde ad una forza per il corpo P scriveremo nel sistema SR: F=ma nel sistema SR’: F’= ma’ ma da ma= maR + ma’ F- maR = ma’ quindi l’accelerazione del sistema SR’ viene vista come una forza - maR che non risulta legata all’azione di nessun corpo ma che agisce su tutti i corpi considerati da SR’. Es. autobus che accelera, tutti i passeggeri sono spinti verso la parte posteriore. G. Bracco - Appunti di Fisica Generale
Si osservano forze fittizie (dette anche inerziali o pseudoforze) anche nel caso di un sistema rotante, sebbene la trattazione sia più complicata. Abbiamo già visto che un corpo che ruota di moto circolare uniforme ha una accelerazione centripeta |a| = 2r’ = v2 /r’ dovuta ad una forza che causa il moto circolare (es. fune vincolata ad una estremità, che trattiene il corpo) Supponiamo che il corpo A di massa m sia su una giostra che ruota alla stessa velocità angolare = |v|/r’ . Rispetto alla giostra il corpo A è fermo e quindi a’=0 (e v’=0). Ma la forza centripeta della fune è reale e quindi causerebbe il movimento verso il centro di rotazione. Occorre che vi sia una forza centrifuga (fittizia) che equilibri la forza reale. Es. autobus in curva: i passeggeri in piedi devono tenersi alle maniglie per non scontrare le pareti laterali. G. Bracco - Appunti di Fisica Generale
Per un sistema rotante, oltre alla forza centrifuga ci sono anche altre forze fittizie legate 1) alla variazione della velocità angolare nel tempo (accelerazione angolare =d/dt forza corrispondente m r’) 2) al moto del corpo rispetto al sistema rotante (forza di Coriolis m (2 v’) ) Nel caso della Terra la forza di Coriolis determina uno spostamento nel moto di masse d’aria (vento) o d’acqua (correnti), l’erosione prevalente di una sponda dei fiumi rispetto all’altra, il consumo prevalente di una rotaia dei treni rispetto all’altra, …. Questi effetti dipendono dalla posizione (emisfero boreale o australe) sulla superficie della Terra. Animazione: inerziali (par) G. Bracco - Appunti di Fisica Generale
Sistema non inerziale Sistema inerziale G. Bracco - Appunti di Fisica Generale
In questo esempio una pallina si muove sopra un disco che ruota (non c’e’ contatto tra pallina e disco). Nel sistema inerziale la traiettoria della pallina è rettilinea e la risultante delle forze applicate è nulla. Nel sistema non inerziale (fisso con il disco) la traiettoria è curva a causa del moto del disco e occorre introdurre una risultante diversa da zero. G. Bracco - Appunti di Fisica Generale
Cenni alla Relatività ristretta • Se la velocità relativa dei due SR è elevata le trasformazioni di Galileo devono essere sostituite da quelle di Lorentz. La necessità di tali trasformazioni è dovuta al fatto che la velocità della luce “c” è risultata sempre costante nonostante vari esperimenti siano stati fatti per confutarne la costanza. • Se una sorgente in moto a velocità v emette un impulso di luce, la luce viaggia a velocità c e non c+v come vorrebbero le trasformazioni di Galileo. • Einstein nel 1905 partì dalle seguenti 2 ipotesi: • (principio di relatività) le leggi della fisica sono uguali in tutti i sistemi di riferimento inerziali • la velocità della luce nel vuoto è una costante uguale per tutti i sistemi di riferimento. • Il principio di relatività estende quello insito nelle trasformazioni di Galileo che richiedeva che le leggi (solo) della meccanica fossero uguali per tutti gli osservatori inerziali poiché l’accelerazione è la stessa (F=ma). Tutto ciò si basa sul concetto di spazio e tempo assoluti e tale concetto verrà profondamente modificato: lo spazio e il tempo non sono più da considerarsi entità separate. • Einstein mostrò che la simultaneità degli eventi è relativa al SR. Infatti per definire la simultaneità, ovvero che due eventi avvengano nello stesso istante, bisogna definire una procedura. G. Bracco - Appunti di Fisica Generale
Per definire che due eventi che avvengono in P e Q siano simultanei, quando capitano mandiamo due impulsi di luce verso il punto medio M di PQ. Se i due impulsi arrivano nello stesso istante, gli eventi sono simultanei. Consideriamo ora due sperimentatori, uno fermo, SF, e uno, SM, in moto relativo con velocità v. Presa la stessa base spaziale da SF (AC con punto medio B) e da SM (LN con punto medio M), M P Q ACLN, poniamo in B e M due sorgenti di luce che emettono impulsi verso A,B e L,N rispettivamente. Quando M passa per B vengono emessi queste coppie di impulsi. SF vede arrivare contemporaneamente gli impulsi in A e C. Parimenti SM vede arrivare contemporaneamente in L e N gli impulsi. Questa descrizione però non è quella vista da SF. Infatti il punto N si allontana dal punto di partenza, cioè quando MB e ci fu l’emissione dell’impulso sia per SF sia per SM, al contrario L si avvicina. C A B N L M G. Bracco - Appunti di Fisica Generale
Quindi l’impulso arriva prima in L che in A e arriva dopo in N rispetto a C. La contemporaneità è perciò un concetto relativo. Per SF, xL(t)=xL(0)+vt, xN(t)=xN(0)+vt Ed i 2 impulsi x1(t)=xM(0)-ct, x2(t)=xM(0)+ct Arrivano in L e N ai tempi determinati da x B C A 1 2 M L N x1(t1)=xL(t1) , x2(t2)=xN(t2). Se d è la distanza fra L e N, si ha perciò t1=(xM(0)- xL(0))/(c+v)=d/(2(c+v)), t2=(xN(0)- xM(0))/(c-v)=d/(2(c-v)) e SF vede i due eventi non contemporanei ma separati da un intervallo t=t2- t1=v d/(c2-v2). Le coordinate spaziali dei punti L e N per SF sono x1= x1(t1)=xM(0)-ct1, x2=x2(t2)=xM(0)+ct2, ovvero x=x2- x1=c(t2+ t1)=c2 d/(c2-v2) e, confrontandola con l’espressione per i tempi, t=(v/ c2) x. Solo se la velocità della luce c, gli eventi, che capitano in punti diversi per SF, sarebbero contemporanei. Questo mostra che se c è finita e uguale per tutti gli osservatori inerziali, tempo e spazio non possono essere più considerati separati ma si devono considerare come componenti di un vettore quadridimensionale (x,y,z,ct). G. Bracco - Appunti di Fisica Generale
È possibile dimostrare che le trasformazioni di Lorentz (la direzione del moto relativo è presa come asse x per entrambi i sistemi S e S’, quest’ultimo si muove con velocità v rispetto a S) sono espresse da: x’=(x-vt), y’=y, z’=z, t’=[t-(v/c2)x], e quelle inverse (v diventa –v) x=(x’+vt’), y=y’, z=z’, t=[t’+(v/c2)x’] da osservare che il tempo non e’ lo stesso ma si trasforma in modo simile alla coordinata spaziale x, il coefficiente di Lorentz vale =(1-v2 /c2)-½ e per v<<c tende a 1 e quindi x’=x-vt e t’=t cioè le trasf.di Lorentz tendono a quelle di Galileo per velocità piccole in confronto a c. Le trasformazioni per la velocità sono vx’= (vx-v)/(1- vxv/c2), vy’= (vy/ )/(1- vxv/c2), vz’= (vz/ )/(1- vxv/c2) e quelle inverse vx= (v’x+v)/(1+ vxv/c2), vy= (v’y/ )/(1+ vxv/c2), vz= (v’z/ )/(1- vxv/c2), Da osservare che la somma di velocità è sempre inferiore o uguale a c come richiede il risultato sperimentale. G. Bracco - Appunti di Fisica Generale
L’accelerazione non è più un invariante come per le trasf.di Galileo ma ax’= ax/ [(1- vxv/c2)]3, ay’= ay/ [(1- vxv/c2)]2+(axv vy /c2)/[2(1- vxv/c2)3] , az’= az/ [(1- vxv/c2)]2+(axv vz /c2)/[2(1- vxv/c2)3] . In conclusione, osserviamo ancora che: si hanno effetti di dilatazione temporale (nel sistema in moto, il tempo scorre più lentamente) di contrazione spaziale (nella direzione delle velocità v tra i sistemi di riferimento le lunghezze sono accorciate, perpendicolarmente al moto non si ha variazione). La massa di un corpo non è più un invariante ma dipende dallo stato di moto del corpo stesso. Infatti se rimanesse costante, applicando una forza costante si ottiene un’accelerazione costante e quindi basta aspettare un tempo finito per raggiungere la velocità c e superarla. Invece m= m0, dove m0 è la massa a riposo (per i fotoni che viaggiano a velocità c, la massa è nulla!). Da questo si ricava anche che la massa di un corpo può essere trasformata in energia (quantità che definiremo in seguito) e viceversa con la ben nota relazione E=m0c2. G. Bracco - Appunti di Fisica Generale
Scrittura in termini matriciali della trasformazione di Lorentz • x’=(x-vt), y’=y, z’=z, t’=[t-(v/c2)x], • x’ 0 0 -v x • | y’ |= | 0 1 0 0 | | y | • | z’ | | 0 0 1 0 | | z | • t’ -(v/c2) 0 0 t corrisponde ad una rotazione nello spazio quadridimensionale che anziché conservare la distanza (euclidea) in 3D come le rotazioni già incontrate, conserva la velocità della luce c o meglio l’intervallo percorso dalla luce nel tempo t in qualunque sistema di riferimento x2+ y2+ z2=(ct)2 , x2+ y2+ z2-(ct)2=0 ed anche x’2+ y’2+ z’2-(ct’)2=0 . G. Bracco - Appunti di Fisica Generale