Download
1 / 27
270 likes | 432 Views
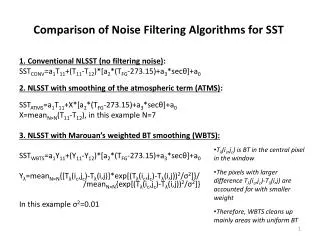
Smoothing atmospheric term in SST for reduction of Gaussian noise. SST formulations. Daytime SST SST=a 0 M 15 + a 1 (M 15 -M 16 ). SST ref + a 2 .(M 15 -M 16 ).(sec(Ɵ)-1) +a 3 Nighttime SST SST=a 0 M 15 +a 1 M 12 + a 2 M 16 + a 3 (M 12 -M 16 ) .(sec(Ɵ)-1) + a 4 .(sec(Ɵ)-1) + a 5.

E N D
Smoothing atmospheric term in SST for reduction of Gaussian noise
SST formulations • Daytime SST SST=a0M15 + a1(M15-M16). SSTref + a2.(M15-M16).(sec(Ɵ)-1) +a3 • Nighttime SST SST=a0M15+a1M12+ a2M16 + a3(M12-M16) .(sec(Ɵ)-1) + a4.(sec(Ɵ)-1) + a5
Principle • Daytime SST SST=a0M15 + a1(M15-M16). SSTref + a2.(M15-M16).(sec(Ɵ)-1) +a3 • Nighttime SST SST=a0M15+a1M12+ a2M16 + a3(M12-M16) .(sec(Ɵ)-1) + a4.(sec(Ɵ)-1) + a5 Low SNR
Principle Typically, smoothing is done with a sliding averaging window of size n × n, using only clear-sky pixels. What size n should be used? s(i-1,j-1) s(i-1,j-1) s(i,j-1) s(i,j-1) s(i+1,j-1) s(i+1,j-1) s(i-1,j) s(i-1,j) s(i,j) s(i,j) s(i+1,j) s(i+1,j) s(i-1,j+1) s(i-1,j+1) s(i,j+1) s(i,j+1) s(i+1,j+1) s(i+1,j+1)
Original SST SST with smoothing of M15-M16 (11 × 11) • Smoothing the differential term with a standard averaging window: • Reduces noise • Has minor impact on global statistics • But… • Introduces atmospheric effects in the SST fields even when the window is small.
Alternative approach M15and M16 are processed using nonlocal filtering, i.e., Pixels in a window of size n × nare given a weight, w(i,j) depending on their similarity to the central pixel. - The size of the window plays a minor role compared to the weighting function w - The spatial filtering is consistent with the spectral information in every band s(i-1,j-1) s(i,j-1) s(i+1,j-1) w(i-1,j)=exp[-(s(i-1,j) - s(i,j))/ σ2] s(i-1,j) s(i,j) s(i+1,j) s(i-1,j+1) s(i,j+1) s(i+1,j+1)
Nonlocal filter M15 and M16 n=3, σ=0.01 For σ=0.01 ∆T > 0.08 K → w<0.5
Nonlocal filter M15 and M16 n=5, σ=0.01 For σ=0.01 ∆T > 0.08 K → w<0.5
Nonlocal filter M15 and M16 n=7, σ=0.01 For σ=0.01 ∆T > 0.08 K → w<0.5
Nonlocal filter M15 and M16 n=9, σ=0.01 For σ=0.01 ∆T > 0.08 K → w<0.5
Nonlocal filter M15 and M16 n=3, σ=0.1 For σ=0.1 ∆T > 0.25 K → w<0.5
Nonlocal filter M15 and M16 n=5, σ=0.1 For σ=0.1 ∆T > 0.25 K → w<0.5
Nonlocal filter M15 and M16 n=7, σ=0.1 For σ=0.1 ∆T > 0.25 K → w<0.5
Nonlocal filter M15 and M16 n=9, σ=0.1 For σ=0.1 ∆T > 0.25 K → w<0.5
Nonlocal filter M15 and M16 n=3, σ=1 For σ=1 ∆T > 0.8 K → w<0.5
Nonlocal filter M15 and M16 n=5, σ=1 For σ=1 ∆T > 0.8 K → w<0.5
Nonlocal filter M15 and M16 n=7, σ=1 For σ=1 ∆T > 0.8 K → w<0.5
Nonlocal filter M15 and M16 n=9, σ=1 For σ=1 ∆T > 0.8 K → w<0.5
Original SST 3 × 3 average box 5 × 5 average box 7 × 7 average box YNL (n=5, σ=0.01) YNL (n=7, σ=0.01) YNL (n=9, σ=0.01) YNL (n=3, σ=0.01) YNL (n=3, σ=0.1) YNL (n=5, σ=0.1) YNL (n=7, σ=0.1) YNL (n=9, σ=0.1)
YNL (n=5, σ=0.01) YNL (n=7, σ=0.01) YNL (n=9, σ=0.01) YNL (n=3, σ=0.01) YNL (n=3, σ=0.1) YNL (n=5, σ=0.1) YNL (n=7, σ=0.1) YNL (n=9, σ=0.1) YNL (n=3, σ=1) YNL (n=5, σ=1) YNL (n=7, σ=1) YNL (n=9, σ=1)
Results Original SST Smooth M15-M16 (11 × 11) Nonlocal filter M15 and M16