Download
1 / 14
140 likes | 165 Views
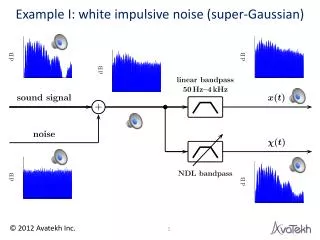
Detection in Non-Gaussian Noise. JA Ritcey University of Washington January 2008. Outline. Based on Miller & John B. Thomas IEEE IT 1975 Gaussian noise shows few outliers Impulsive noise is common in practice – lightning, glitches, interference, pulses …

E N D
Detection in Non-Gaussian Noise JA Ritcey University of Washington January 2008
Outline • Based on Miller & John B. Thomas • IEEE IT 1975 • Gaussian noise shows few outliers • Impulsive noise is common in practice – lightning, glitches, interference, pulses … • What does LR theory tell us about non-Gaussian noise detection architectures?
Detection Problem • White Noise (iid) • Constant signal • Multiple Observations • Known noise pdf • Weak signal regime • Architecture
Unknown Parameter Issues • This is clear, but • f_n must be known • Amplitude theta must be known • Generally, the amplitude is unknown
Architecture • ZMNL g(.) memory less non-linearity • Accumulate all N data, then threshold
What is Amplitude is unknown, but small (weak-signal regime)
Impact of Noise PDF on ZMNL.c indexes the tail decay ratec = 2 is Gaussian c<2 long-tailed
Conclusions • Impulsive Noise kills Gauss detector performance –high false alarm rates • Noise pdf impacts the ZMNL • Gaussian – linear ZMNL • Long Tailed – ZMNL suppresses large samples. Why? Large data likely noise • Short Tailed – ZMNL enhances large samples. Why? Large data likely signal
Additional Issues • Simulation • Generating the Noise samples -- still an open problem for Gen Gauss! • Testing and visual impact • Performance (Qo,Qd), ARE, efficacy • Many other impulsive noise models introduced since then • What about dependence? • Non-Gaussian dependent noise?