Download
1 / 22
1.14k likes | 6.11k Views
Robot suiveur de ligne. Année 2010/2011. Sarah El mouftari Roxane Assana Jérémy Brandt Amaury Debruyckere. Sommaire. - Présentation: - Présentation du projet - Cahier des charges - Étude du besoin: - Etude fonctionnelle - Chaîne d’analyse fonctionnelle

E N D
Robot suiveur de ligne Année 2010/2011 Sarah El mouftari Roxane Assana Jérémy Brandt Amaury Debruyckere
Sommaire • - Présentation: • - Présentation du projet • - Cahier des charges • - Étude du besoin: • - Etude fonctionnelle • - Chaîne d’analyse fonctionnelle • - Servomoteurs, capteurs et châssis: • 1- FP1: Être capable de suivre une ligne tracée au sol. • 2- FC1: Avoir un déplacement le plus régulier possible • 3- FC2: Respecter l’encombrement imposé • 4- FC3: S’adapter à une source d’énergie • Programmation: • 5- FC4: S’adapter au tracé de la ligne
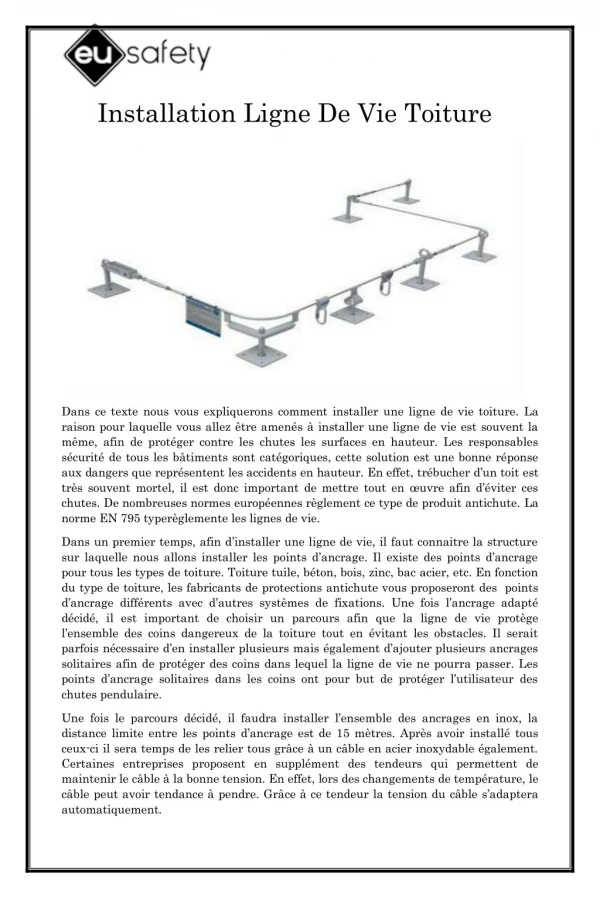
Présentation du projet Objectif: Construire un robot capable de suivre le tracé d’une ligne courbe. Problématique: Comment peut-on obliger un robot à suivre une ligne courbe tracée sur le sol ? Solution trouvée par le groupe: Notre robot se déplacera sur deux roues motrices (servomoteurs) et une roue libre, détectera la ligne grâce à des capteurs optiques et pourra rester sur le trajet grâce à un micro contrôleur.
Déplacement souhaité Ligne tracée sur le sol FC4 FP1 Étude du besoin Robot suiveur de ligne Énergie FC3 FC1 FC2 Précision du déplacement Encombrement FP1: suivre une ligne tracée au sol FC1: déplacement le plus régulier FC2: respecter l’encombrement imposé FC3: s’adapter à une source d’énergie FC4: s’adapter au tracée de la ligne
Chaîne fonctionnelle Chaîne d’information Acquérir Traiter Communiquer Robot en dehors de la ligne Capteurs infrarouge Microcontrôleur ( PIC 16F88 ) Pic 16F88 Action Suivre une ligne Chaîne d’énergie Alimenter Distribuer Convertir Transmettre Batterie 6V Continu Platine électronique du servomoteur Moteur à courant continu Réducteur à engrenages Robot sur la ligne Servomoteur
1- FP1: Etre capable de se déplacer en suivant une ligne tracée au sol • Est-ce que le robot aura une vitesse de 5cm/s si le servomoteur tourne à 52 tr/min ? • Comment débrider le servomoteur pour avoir une rotation continue des roues?
1.1- Calcul du rapport de réduction du servomoteur Schéma de l’engrenage du servomoteur: Nmoteur= 4448 tr/min Roue = Ø6 cm Rp=15 dents Rg=35 dents O=10 dents N=41 dents Vp=10 dents Vg=62 dents Bp=10 dents Bg=50 dents Sortie Roue Bp Rg Rp N Bg Vp Vg O entrée donc
1.2- Débridage du servomoteur 1ère étape: supprimer la butée mécanique située sur l’axe de sortie 2ème étape: éliminer la liaison en rotation entre l’axe de sortie et le potentiomètre 3ème étape: régler le potentiomètre à 0
2 - FC1: Avoir un déplacement le plus régulier possible • Pour cela il faut agir sur : • Les servomoteurs • La distance entre les capteurs
2.1: Fonctionnement des Servomoteurs - Commandé par des trains d'impulsions (période constante de 20ms) (PROGRAMMATION) • - Constitué de plusieurs engrenages (roues et pignons) BUT: réduire la vitesse en augmentant le couple.
2.2- Les capteurs CNY70 Constitué de: -1 diode IR (émetteur) -1 phototransistor (récepteur) Fonctionnement : Donc une augmentation de la distance entre les 2 capteurs permettrait un déplacement plus fluide.
3- FC2: respecter l’encombrement imposé Données actuelles de la voiture: _ 173mm de large _ 250mm de longueur _ 90mm de hauteur Il faut donc changer le support actuel des capteurs et la largeur restera inchangé car nous ne pouvons pas refaire entièrement la voiture. 250mm 173mm 90mm
Supports capteurs Support capteurs actuel Support capteurs après changement
4- FC3:S’adapter à une source d’énergie Quel tension choisir ? Quel autonomie cette tension peut elle fournir ?
4.1- La tension • Le servomoteur peut aller jusqu’à une tension de 6Volts • Le microcontrôleur à lui besoin de 5Volts • 4 piles de 1,2V rechargeables ensemble jusqu’à 5Volts
5- FC4: S’adapter au tracée de la ligne Il faut : _ faire un programme _ calcul de la vitesse de rotation des roues dans les virages
5.1- Le programme Légende du programme :
5.2- Calcul des roues dans les virages Ord= 21.5mm Org=178.5mm K=1/278 IIVrgII=0,054 m/s Le résultat est de 6,31 tr/min
Rapport de vitesse entre la roue droite et la roue gauche ωMrg Le résultat est 8.23 ωMrd Il faut donc une période de 165
Conclusion • Ce PPE nous a permis: • Utiliser Flowcode > programmation • Fonctionnement servomoteur et capteurs • Analyser une carte électronique • Approfondir nos connaissances en sciences de l’ingénieur