Download

1 / 42
420 likes | 534 Views
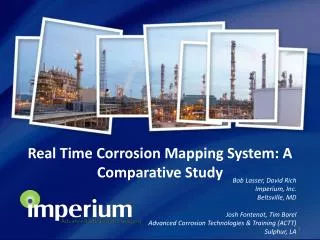
FirstMap Corrosion Mapping System Webinar July 18, 2013. Bob Lasser, President Imperium, Inc . Beltsville, MD. Agenda. Introduction to FirstMap Corrosion Mapping Technology Description Application Scope Product Demonstration Recent Study Q&A. About Imperium. Founded in 1996

E N D
FirstMap Corrosion Mapping System Webinar July 18, 2013 Bob Lasser, President Imperium, Inc. Beltsville, MD
Agenda • Introduction to FirstMap Corrosion Mapping • Technology Description • Application Scope • Product Demonstration • Recent Study • Q&A
About Imperium • Founded in 1996 • Sole provider of ultrasound camera technology • Patented technology • Systems in petrochemical, aerospace, medical fields
Why Industry Needs A New NDT Device • Lack of trained NDT personnel • Lack of confidence in thickness readings, missed corrosion • Need higher POD, faster device • Need areas where AUT can’t reach • Advances in imaging technology • A picture is worth 1000 words • Time and cost pressures – Need to do more with less
FirstMap Advantages • Images are easier to interpret • FirstMap provides an actual image of the defect including thicknesses • Very fast • High resolution • Higher confidence than single thickness readings • Not effected by beam dispersion • Built in delay line • No extensive training required; less trained technician • Real time
B-scan to C-scan Defect Defect
Pulse Echo – 50/50 Beamsplitter Sound Transmitter Array Pulse echo image of quarter Subsurface fault Video Water Lens Acoustic beamsplitter Target
Imperium’s Patented ArchitectureApplies optical imaging techniques to ultrasound Optical Architecture: Optical Sensor (CCD) Flash Lens Ultrasonic Architecture: Acoustic Flashlight (2) F1 Acoustic Lens Ultrasonic Sensor Note: CCD means Charged Coupled Device
Imaging Array – 100 micron pixels120 rows x 120 columns = 14,400 pixels
FirstMap • Made up of control unit, camera probe • 3” pipes down to flat • Images through coatings • Equipped with pulse echo or dual element transducer for thickness readings • Battery powered • Rugged
Calibration Procedure Dual element mounted to camera head Place on thin section of wedge– Note thickness Place on thick section of wedge– Note thickness Remove transducer
Workflow Power up Calibrate Scan Analyze/Review
8” Rough Pipe Section Top of pipe with very rough surface Holes on bottom of same pipe C-scan image through rough top surface
Storage Tank Bottoms Compare FirstMap’s easy to interpret readout
Microbiological Induced Corrosion Black areas indicate MIC, note the veins of MIC also
Benefits to NDT Industry • Broad application base • Pipelines, storage tanks, pressure vessels • Find smaller amounts of corrosion faster • Does not sacrifice any current data quality • Provide better information to end customer • Better tool to provide comparisons • Use Level 2 thickness inspector to generate images, not just readings • Get to areas where current tools can’t go • Cover more area faster while capturing better data
Advanced Corrosion Technologies “The probability of detection is far superior to standard thickness readings. FirstMap™ is a diagnostic tool that can instantly detect subsurface corrosion down to 1 mm pits. We are now able to quickly and easily identify problem areas that could potentially lead to much bigger issues.” -Josh Fontenot, Director of Technologies, ACTT
About Study • Wanted to compare Imperium’s FirstMap Corrosion Imaging system to Phased Array UT (PAUT) • Investigated resolution • Other factors included ease of use, cost, training requirements • Joint study between Imperium, Inc. (Beltsville, MD) and Advanced Corrosion Technologies & Testing (Sulphur, LA)
B-scan vs. C-scan Phased Array FirstMap
Resolution Study:FirstMapvs Phased Array • Investigated axial, lateral, and elevation resolution • Used Omniscan MX2 • Both systems working at 5 MHz • Did mathematical study, then took data to compare expected results
Omniscan PAUT System Test Settings: Probe: 5L64-NW1 (5 MHz) Wedge: SN1-0L5L64 Mode: Phased array Focal Depth: 0.1” Focal Law: Linear sector with overlap Skew Direction: 900(straight down mode) Scan Offset: 0 Index Offset: 0 Element Quantity: 8 First Element: 1 Last Element: 64 Thickness: 0.25” Surface: Flat plate
FirstMap System Frequency: 5 MHz Number of Pulses: 1 Gate start: 0.1” Gate width: 0.5”
Phased Array Theoretical Resolution Lateral (X): ΔD = (0.44 x V) / (F x sin (θ/2)) Axial(Z): ΔZ = V x T/2 Elevation(Y): Defined by the length of the array elements, and will be on the order of several millimeters Source: Olympus NDT Manual
Resolution Study - Set A: 0.100” holes Phased Array FirstMap
Resolution Study - Set B: 0.040” holes Phased Array FirstMap
Resolution Study - Set C: 0.023” holes Phased Array FirstMap
Resolution Results FirstMapOmniscan: Amplitude Omniscan: TOF
Comparative Study: FirstMap, X-ray, Phased Array • Reviewed different techniques for corrosion mapping • Used common standards • Recorded image quality • Recorded time of setup, scan, training cost
Targets Studied Stepped standard Corrosion piece 8” diameter pipe section
Stepped Standard FirstMap Phased Array X-ray 192 iridium
0.25” Corroded Steel Panel FirstMap Phased Array X-ray 192 iridium
8” Diameter Pipe Section FirstMap Phased Array X-ray 192 iridium
Thank you for your time. Bob Lasser 301-431-2900 x 111 blasser@imperiuminc.com