Download
1 / 45
820 likes | 1.65k Views
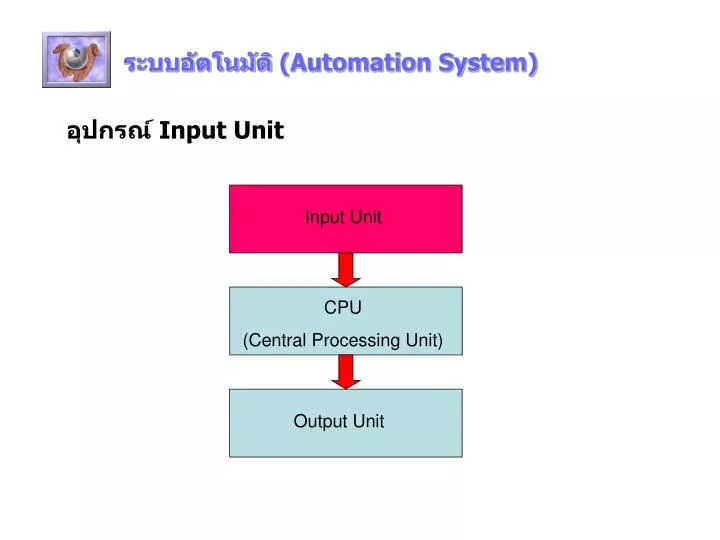
ระบบอัตโนมัติ (Automation System). อุปกรณ์ Input Unit. Input Unit. CPU (Central Processing Unit). Output Unit. เซนเซอร์แสง. เซนเซอร์แสงจะทำหน้าที่เปลี่ยนแบบต่าง ๆ ให้กลายเป็นสัญญาณไฟฟ้า ทำหน้าที่เป็นตาของหุ่นยนต์ โดยอุปกรณ์เซนเซอร์แสงที่นิยมใช้ในหุ่นยนต์ได้แก่. แอลดีอาร์.

E N D
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Input Unit Input Unit CPU (Central Processing Unit) Output Unit
เซนเซอร์แสง เซนเซอร์แสงจะทำหน้าที่เปลี่ยนแบบต่าง ๆ ให้กลายเป็นสัญญาณไฟฟ้า ทำหน้าที่เป็นตาของหุ่นยนต์ โดยอุปกรณ์เซนเซอร์แสงที่นิยมใช้ในหุ่นยนต์ได้แก่
แอลดีอาร์ แอลดีอาร์ (LDR) ย่อมาจาก Light Dependent Resistor ทำหน้าที่ เปลี่ยนระดับความเข้มแสงให้กลายเป็นค่าความต้านทานทางไฟฟ้า โดยถ้ามีแสงตกกระทบมากแอลดีอาร์จะมีค่าความต้านทานน้อย โฟโต้ทรานซิสเตอร์ Photo Transistor มีหลักการทำงานคือ เมื่อแสงมากระทบจนมีค่า ถึงระดับหนึ่งจึงจะทำงาน ซึ่งกระแสไฟฟ้าจะไหลเพียงทางเดียว นิยมใช้วัดแสงที่มีความเข้าไม่แตกต่างกันมากนัก และยังสามารถ รับแสงที่ตาเปล่ามองไม่เห็น โฟโต้ไดโอด Photo Diode มีหลักการทำงานเหมือนโฟโต้ทรานซิสเตอร์ แต่จะ นำกระแสได้น้อยกว่า
เซ็นเซอร์วัดความเข้มแสง (Light Detecting Resister, LDR) เป็นอุปกรณ์วัดความเข้มแสง แสดงออกมาในรูปของค่าความต้านทานทางไฟฟ้า ความต้านทาน= 1 ความเข้มแสง แสง
สวิทช์ลำแสงแบบ อินฟราเรด (Infrared) ประยุกต์ในการตรวจจับเส้นทึบแสง CPU Infrared Rx Infrared Tx ROBOT
อุปกรณ์ Input Unit สำหรับระบบอัตโนมัติ สวิทช์ (Switch) • สวิทช์ลำแสงแบบ อินฟราเรด (Infrared) (ต่อ) Automatic Flushing
เซนเซอร์เสียง เซนเซอร์ทำหน้าที่เปลี่ยนความถี่เสียงให้กลายเป็นสัญญาณไฟฟ้า ทำหน้าที่คล้ายเป็นหูของหุ่นยนต์ โดยอุปกรณ์เซนเซอร์เสียงที่นิยมใช้ในหุ่นยนต์ได้แก่
คอนเดนเซอร์ ไมโครโฟน Condenser Microphone ทำหน้าที่เปลี่ยนระดับของเสียงให้กลาย เป็นระดับแรงดันไฟฟ้า ซึ่งมีขนาดเล็กและความไวสูง หลักการของลำโพง
อัลตราโซนิคเซนเซอร์ Ultrasonic Sensor ทำหน้าที่คล้ายกับไมโครโฟน แต่จะรับเฉพาะ ความถี่ที่สูงประมาณ 38-40 กิโลเฮิทซ์ ซึ่งสูงกว่าที่หูมนุษย์จะได้ ยิน มักนำไปใช้ในการวัดระยะทาง
เซนเซอร์สัมผัส เซนเซอร์สัมผัสเป็นอุปกรณ์ที่ทำหน้าที่เปลี่ยนการสัมผัส ให้เป็นสัญญาณ ทางไฟฟ้า ซึ่งจะทำหน้าที่เป็นผิวหนังรับความรู้สึกของหุ่นยนต์ โดยอุปกรณ์เซนเซอร์สัมผัสที่นิยมใช้ในหุ่นยนต์ ได้แก่ • สวิทช์ทางกล (Mechanical Switch) มีลักษณะเป็นสะพานไฟ
สวิทช์แบบกลไก Mechanical Switch เป็นอุปกรณ์แบบกลไก ที่ทำหน้าที่รับแรงกด โดยที่หน้าสัมผัสของสวิทช์จะเกิดการนำกระแสไฟฟ้า ซึ่งเรา สามารถนำไปตัดต่อให้เกิดสัญญาณทางไฟฟ้าได้
สวิทช์แม่เหล็ก (Magnetic Switch) (ต่อ) สวิทช์ (Switch) RxBox Level Monitoring
รีดสวิทช์ Reed Switch ทำหน้าที่เหมือนกับสวิทช์ แต่ไม่ได้ตรวจจับการกด แต่จะตรวจจับแรงแม่เหล็กแทนการกด ซึ่งจะทำให้ไม่เกิดการ กระแทก
สวิทช์แม่เหล็ก (Magnetic Switch) (ต่อ) Hall IC Magnet Hall Effect Sensor
เซนเซอร์อุณหภูมิ เซนเซอร์อุณหภูมิ(Temperature Sensor) เป็นอุปกรณ์ที่ทำหน้าที่เปลี่ยน ระดับอุณหภูมิ เช่น ร้อน-เย็น เป็นระดับแรงดันไฟฟ้า ซึ่งจะทำหน้าที่เป็นส่วนรับ ความรู้สึกของหุ่นยนต์
เทอมิสเตอร์ Thermister เป็นอุปกรณ์ที่เปลี่ยนอุณหภูมิให้กลายเป็นระดับ ความต้านทาน ซึ่งมีอยู่ 2 แบบ คือเอ็นทีซี และ พีทีซี เทมเพอเรเจอร์เซนเซอร์โมดูล Temperature Sensor Module เป็นอุปกรณ์ที่ทำหน้าที่เปลี่ยน ระดับอุณหภูมิเป็นสัญญาณไฟฟ้าที่มีความเที่ยงตรงสูง เซนเซอร์ แบบนี้จะให้ความเที่ยงตรงของค่าที่อ่านจากจากเทอมิสเตอร์
เซ็นเซอร์วัดอุณหภูมิ (Temperature Sensor) Temperature Sensor มีหลายชนิด และมีจุดประสงค์การใช้งานที่ต่างกันออกไป แต่ในงานอิเล็กทรอนิกส์ มี 2 ชนิดที่ใช้งานกันอย่างกว้างขวาง คือ • เทอร์มิสเตอร์ (Thermistor) เป็นเซ็นเซอร์ที่วัดอุณหภูมิออกมาเป็นค่าความต้านทาน ส่วนใหญ่จะให้สัญญาณแบบ NTC (Negative Temperature Conversion) • RTD(Resistance Temperature Detector) เป็นเซ็นเซอร์ที่วัดอุณหภูมิออกมาเป็นค่าความต้านทาน จะให้สัญญาณแบบ PTC (Positive Temperature Conversion) มีความเป็นเชิงเส้นสูง
เซ็นเซอร์วัดความชื่นสัมพัทธ์ (Relation Humidity Sensor) RH Sensor เป็นเซ็นเซอร์ที่แปลงโมเลกุลความชื้นในอากาศ ให้เป็นสัญญาณทางไฟฟ้า เช่น แรงดันไฟฟ้าที่สามารถนำไปใช้งานได้ง่าย
เซนเซอร์แก๊ส เซนเซอร์แก๊ส(Gas Sensor) ทำหน้าที่คล้ายจมูกของหุ่นยนต์ที่แยกความ หนาแน่นของแก๊สที่อยู่ในอากาศ โดยโครงสร้างภายในจะมีลักษณะพิเศษที่สามารถ เปลี่ยนความหนาแน่นของแก๊สเป็นสัญญาณไฟฟ้าได้
ภาคจ่ายไฟ แบตเตอรี่ หม้อแปลงไฟฟ้า แผงพลังงานแสงอาทิตย์ ภาคจ่ายไฟ เป็นส่วนที่ทำหน้าที่จ่ายพลังงานไฟฟ้าเพื่อไปเลี้ยงวงจรต่าง ๆ ในการขับ เคลื่อนกลไกของหุ่นยนต์ โดยหุ่นยนต์ที่เคลื่อนที่ได้นิยมใช้แบตเตอรี่ ส่วนหุ่นยนต์ ที่ตั้งอยู่กับที่นิยมใช้เป็นหม้อแปลงไฟฟ้าเป็นต้น
ซิ้งค์คาร์บอน แบตเตอรี่แบบ Zinc-Carbon นั้นโครงสร้างภายในประกอบด้วย สังกะสีและถ่านอัดแน่นเป็นแกนกลางและมีกรดเป็นตัวทำปฎิกิริยา และเมื่อใช้พลังงานจนหมดจะไม่สามารถนำมาใช้ใหม่ได้ อัลคาไลท์ Alkaline โครงสร้างจะประกอบด้วยสังกะสีและแมงกานิสออกไซด์ อัดเป็นแกนกลาง โดยใช้สารอัลคาไลท์เป็นตัวทำปฎิกิริยา ซึ่งแบตเตอรี่ ชนิดนี้จะให้พลังงานยาวนานกว่าแบบซิ้งค์คาร์บอน นิเกิลแคดเมียม Nickel-Cadmium มีโครงสร้างประกอบด้วยนิกเกิล-ไฮดรอกไซด์ และแคดเมียมเป็นแกนกลาง โดยมีสารโปรแตสเซียม-ไฮดรอกไซด์ เป็นตัวทำปฎิกิริยา ถ่านชนิดนี้สามารถนำไปประจุไฟใหม่ได้
นิเกิลเมทัลไฮไดร เป็นแบตเตอรี่ที่สามารถนำมาใช้ประจุไฟใหม่ได้ โดยจะไม่มี ปัญหาเมโมรี่เอฟเฟก สามารถใช้แทนแบตเตอรี่แบบนิเกิลแคด- เมียม ลิเทียมไอออน จะเป็นแบตเตอรี่ที่สามารถประจุไฟใหม่ได้ จ่ายพลังงานได้สูงโดย ที่มีน้ำหนักเบา ตะกั่วกรด ภายในประกอบด้วยตะกั่วแท่งเป็นขั้วแบตเตอรี่และมีแผงตะกั่ว วางเรียงเป็นชั้น ๆ มีน้ำกรดความเข้มข้นสูงเป็นตัวทำปฎิกิริยา สามารถจ่ายกระแสไฟได้สูงและประจุไฟใหม่ได้
ซีลเลดแอคซิค แบตเตอรี่แบบนี้ออกแบบมาเพื่อทดแทนแบตเตอรี่แบบตะกั่วกรด และไม่ต้องเติมน้ำกลั่น
หม้อแปลงไฟฟ้า ที่ใช้ส่วนใหญ่จะเป็นแบบที่จ่ายเป็นกระแสตรง ภาคจ่ายไฟแบบนี้เหมาะ กับหุ่นยนต์ที่ไม่มีการเคลื่อนที่ตำแหน่งที่ตั้ง
แผงพลังงานแสงอาทิตย์ เป็นแหล่งจ่ายพลังงานอีกรูปแบบหนึ่งที่นิยมใช้ในงานหุ่นยนต์ โดยแผง พลังงานแสงอาทิตย์จะทำหน้าที่เปลี่ยนพลังงานแสงให้เป็นพลังงานไฟฟ้า โดยใช้ แงดันไฟฟ้าเป็นแบบกระแสตรง ซึ่งขนาดของพลังงานไฟฟ้าจะขึ้นอยู่กับขนาดของ แผงพลังงานแสงอาทิตย์
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit Input Unit CPU (Central Processing Unit) Output Unit
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ LED ( Light Emission Diode) LED ก็คือ Diode ที่เปล่งแสงได้เมื่อมีกระแสไฟฟ้าไหลผ่าน การไหลของกระแสไฟฟ้าผ่านตัว LED จะต้องไหลผ่านจากก้นลูกศร ไปยังหัวลูกศรเท่านั้น จะไหลย้อนศรไม่ได้ Anode cathode กระแสไฟฟ้า กระแสไฟฟ้า
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ LED 7-Segment และ LED Dot Matrix เพื่อให้การแสดงผลสื่อความหมายได้มากขึ้น จึงมีการนำเอา LED มาเรียงต่อกันเป็นตัวเลขที่แยกเป็นส่วนๆ ได้ 7 ส่วน และมีจุดอีก 1 จุด โดยทั่งไปจะมี 7-segment 2 ชนิด คือ ชนิดที่มีขา Anode ร่วม และ ชนิดที่มีขา Cathode ร่วม การเลือกใช้งานขึ้นอยู่กับการออกแบบวงจรว่าต้องการใช้ขาร่วมแบบใด ขณะที่ LED Dot Matrix เป็นการนำ LED มาเรียงต่อกันเป็นแถวและคอลัมน์ เพื่อให้สามารถแสดงเป็นสัญลักษณ์ และตัวอักษรได้ 7-Segment Dot Matrix
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ LCD ( Liquid Crystal Display) เป็นอุปกรณ์ในการแสดงผลโดยใช้ผลึกของเหลวที่เปลี่ยนสีได้ เมื่อมีแรงดันไฟฟ้าไปกระตุ้น มีการวางโครงสร้างภายในแบบเป็นแถว หรือบางชนิดสามารถสั่งงานแสดงเป็นกราฟฟิกส์ได้ Relay จุดประสงค์ของ Relay คือสามารถแยกวงจรไฟฟ้าที่มีความแตกต่างกัน รวมถึงช่วยให้สามารถใช้สัญญาณไฟฟ้าขนาดเล็กๆ ควบคุมการทำงานของอุปกรณ์ไฟฟ้าที่มีขนาดใหญ่ขึ้นได้ สวิทช์ I สนามแม่เหล็กไฟฟ้า
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ Buzzer และ Siren Buzzerเป็นอุปกรณ์กำเนิดเสียง ด้วยวัสดุที่เรียกว่า เพียร์โซ (Pierzo Electrotric) เพียงแค่การป้อนแรงดันไฟฟ้ากระแสตรงเข้าไป มีความถี่เพียงความถี่เดียวใน buzzer แต่ละตัว การกลับขั้วแรงดันไฟฟ้า buzzer จะไม่ทำงาน Sirenเป็นอุปกรณ์กำเนิดเสียง รวมเอาการทำงานของลำโพงปกติ ร่วมกับวงจรสร้างความถี่เสียง และวงจรขยายเสียงเข้าด้วยกัน ดังนั้นเพียงแค่ป้อนแรงดันไฟฟ้ากระแสตรง ก็จะเกิดเสียงดังออกมา Sound Generator Vdc Amplifier
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ DC Motor และ Gear Motor DC Motorหมุนด้วยความเร็วสูงเมื่อจ่ายไฟ สามารถกลับทางหมุนได้เมื่อกลับขั้วแหล่งจ่ายไฟ Gear Motorก็คือ DC Motor ที่ใส่เฟืองทดรอบเพิ่มเข้าไป เพื่อให้ความเร็วรอบลดลงตามความต้องการการนำไปใช้งาน และเพื่อเพิ่มแรงบิดให้กับเพลาของมอเตอร์ DC Motor Gear DC Motor Gear Gear DC Motor
ระบบอัตโนมัติ (Automation System) อุปกรณ์ Output Unit สำหรับระบบอัตโนมัติ Stepping Motor Stepping Motorคือมอเตอร์ที่หมุนที่ละ สเต็ป โดยมากจะมีมุมในการหมุนสเต็ปละ 7.2 องศาโดยประมาณ B วิธีการควบคุมการหมุน หมุนไปด้านหนึ่ง A B C D A C หมุนกลับอีกด้านหนึ่ง A B C D D
ภาคแมคคานิค ภาคแมคคานิค มอเตอร์กระแสตรงที่ไม่มีการทดรอบการหมุน โครงร่าง ส่วนเคลื่อนไหว มอเตอร์กระแสตรงที่มีการทดรอบการหมุน
ระบบอัตโนมัติ (Automation System) Central Processing Unit Input Unit CPU (Central Processing Unit) Output Unit
ระบบอัตโนมัติ (Automation System) High Performance Processor Micro Controller Z80 8055 Celeron MCS51 Pentium II PICxxx Pentium III 68HC11 อื่นๆ Pentium IV
ขั้นตอนการนำไปสู่การประดิษฐ์หุ่นยนต์และโครงงานระบบอัตโนมัติขั้นตอนการนำไปสู่การประดิษฐ์หุ่นยนต์และโครงงานระบบอัตโนมัติ แบ่งได้เป็น 3 ขั้นตอนคือ 1) การเรียนรู้โปรแกรมคำสั่ง และหลักการเขียนโปรแกรม (Programming) Input Unit เรียนรู้หลักการคิด การวิเคราะห์ การแก้ปัญหา เพื่อให้สามารถสร้างโปรแกรมใช้งาน คือการใส่มันสมองให้กับระบบนั่นเอง CPU 2) การเรียนรู้โครงสร้างทางฮาร์ดแวร์ที่เป็นอิเล็กทรอนิกส์ เรียนรู้ทฤษฎี หลักการทำงาน การทดลองวงจรอิเล็กทรอนิกส์พื้นฐานต่างๆ ที่ทำหน้าที่เป็นส่วนของ Input ที่ถือว่าเป็นระบบประสาท และ Output ที่ถือว่าเป็นส่วนแสดงผลและการขับเคลื่อน Output Unit 3) การเรียนรู้การสร้างโปรแกรม เชื่อมโยงกับฮาร์ดแวร์เพื่อสร้างโครงงาน เรียนรู้แนวความคิดในการประยุกต์โปรแกรมคอมพิวเตอร์เพื่อทำงานร่วมกับฮาร์ดแวร์ที่ออกแบบขึ้นมา เพื่อสร้างโครงงานระบบอัตโนมัติได้
วงจรขับมอเตอร์ BD679 C B E E C B