Download
1 / 13
170 likes | 413 Views
Power factor correction. √. P ower factor is the cosine of angle between V and I. S 2 = P 2+ Q 2. Power factor is the cosine of angle between V and I. From power triangle p f = (VIcos Φ )/VI = Active power/ Apparent power S 2 = P 2+ Q 2

E N D
S2 = P2+Q2 Power factor is the cosine of angle between V and I • From power triangle • p f = (VIcosΦ)/VI • = Active power/ Apparent power • S2 = P2+Q2 • Apparent power2 =active power 2+ reactive power2
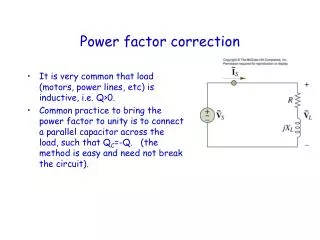
Pf plays an important role in ac ckts since power consumed depends on pf • P=VLIL cosΦ , IL = P/VL cosΦ , for 1Φ , • P= √3 VLIL cosΦ IL = P/ √3 VL cosΦ , for 3Φ • It is clear that for fixed P and V the load current is inversly proportional to pf • Therefore for lpf ,higher will be the load current
Disadvantages of lpf • Large kVA rating of the equipment- kVA=kW/cosΦ .This makes the equipment large and costly. Greater conductor size- Large Cu loss Poor voltage regulation
Causes of lpf • If pf is less than 0.8 it is regarded as lpf. • Most of ac and induction type motors have lpf They work with very small pf during no load (0.2-0.3) and rises to 0.8 - 0.9 at full load. Arc lamps ,Electric discharge lamps , heating furnaces etc operate at lpf. Load variations in the power system causes increase in magnetising current.
Pf improvement • Cause of lpf is the presence of inductive load. • Therefore some devices taking leading pf can be connected in parallel to improve pf of the load. • One such device can be a capacitor.It completely or partially cancells out lagging current.
C draws current Ic that leads supply voltage by 90 degree. Resulting current is the phasor sum of IR and IL-IC,I1is at Φ1 and I2 is at Φ2. SinceΦ2 is less than Φ1 , angle of lag has been reduced and the power factor has been improved
Foll. points may be noted • The ckt current I2 is less than I1 after pf correction • Active component remains the same before and after pf correction • I1cos Φ1 =I2cos Φ2 • But I2sin Φ2 =I1sin Φ1 - IC • VI1cos Φ1 =VI2cos Φ2 • Active power remains the same
VI2sin Φ2 =VI1sin Φ1 -VIC • Therefore net kVAR after pf correction =lagging kVAR before pfcorrection – leading kVAR of equipment
Pf improvement devices • Static capacitors • Synchronous condensors • Phase advancers