Download
1 / 6
60 likes | 204 Views
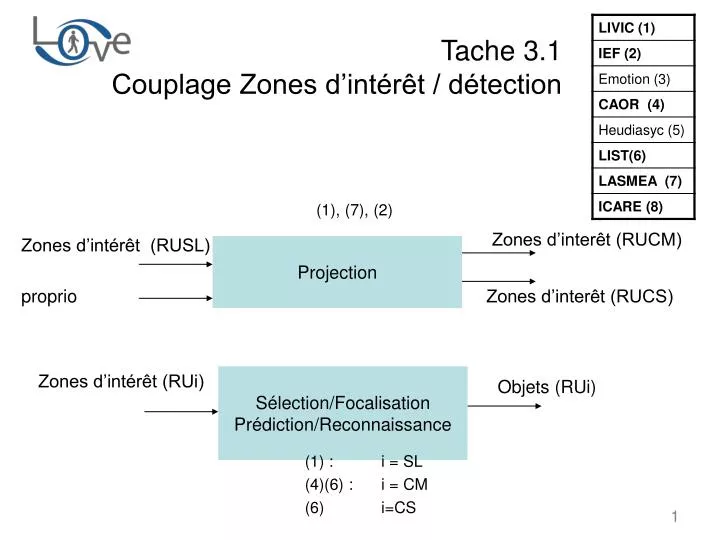
Tache 3.1 Couplage Zones d’intérêt / détection. (1), (7), (2). Zones d’interêt (RUCM). Zones d’intérêt (RUSL). Projection. proprio. Zones d’interêt (RUCS). Zones d’intérêt (RUi). Sélection/Focalisation Prédiction/Reconnaissance. Objets (RUi). (1) : i = SL (4)(6) : i = CM (6) i=CS.

E N D
Tache 3.1Couplage Zones d’intérêt / détection (1), (7), (2) Zones d’interêt (RUCM) Zones d’intérêt (RUSL) Projection proprio Zones d’interêt (RUCS) Zones d’intérêt (RUi) Sélection/Focalisation Prédiction/Reconnaissance Objets (RUi) (1) : i = SL (4)(6) : i = CM (6) i=CS
Tache 3.2 - Solution combinées • 2 type d’architectures identifiées lors du séminaire du 15 novembre (voir présentation SP3)
Capteur 1 Mesures 1 Capteur n Mesures n Pistage Association, Estimation, Prédiction Pistes RUSL Tache 3.2 architecture type 2 • Les entrées sont • Des objets détectés par l’une ou l’autre modalité. • Partenaires identifiés • (5), (7) Détection Estimation Détection Estimation Objets RUSL
1 1-Scene knowledge update 2-Select possible behaviors to compete 2 3-Re-define short to mid-term objective 3 4 4-Plan actions 5-Trigger actions 5 Task control Arc Reflex Robust Mode Concurrent Models Refined Mode Perception control Architecture d’un système quasi-autonome Opportunistic trend → event driven Fusion Data Base Fused Tracks Tracks Objects Premices Flow control Evaluate Locomotion control Real World
8+L 8+L 8m 8m Données proprio Carte vue de dessus Choix de Dt IEF (2) Fenêtre Prédiction supervision 3.1 Détecteur i Objet Recalage Carte vue de dessus Fenêtres Détecteur i Détecteur j Détecteur k Scrutation sur nouvel horizon Focalisation pour détecteur robuste Prise en compte du mouvement des vulnérables sur la carte Objetsrusl 3.2 Association d’objets/pistes Mise à jour/ Estimation pistes Initialisation nouvelles pistes 2.X Gestion des pistes / Evaluation 3.2 Pistesrusl
IEF 3.3 Pistes i ti,id_i, rusl Pistes jtj,id_j, rusl 3.3 Recalage temporel proprio Association piste à piste (marqueurs) Prédiction (inversion de modèles) correction Fusion (3 échelles de temps) Validation Pistes globalesrusl