Download
1 / 1
10 likes | 262 Views
Carte moteurs pas à pas. CENTRALE LYON 1 Équipe française. Les membres : Adrien DO-KHAC Adrien SAMSON Arnaud CUISSON Boris JAILLOT Elie COUTTET Marion DUPIN Quentin GROELLY Sandrine QUEVREUX. Carte maîtresse. BUS I2C. Carte servomoteurs.

E N D
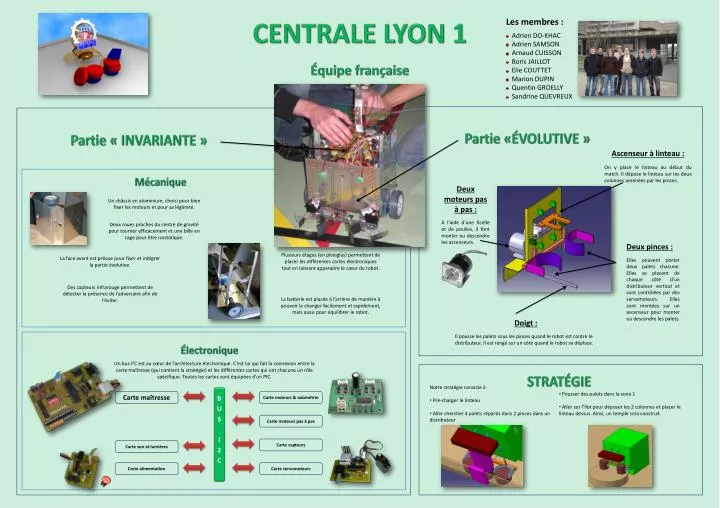
Carte moteurs pas à pas CENTRALE LYON 1 Équipe française Les membres : Adrien DO-KHAC Adrien SAMSON Arnaud CUISSON Boris JAILLOT Elie COUTTET Marion DUPIN Quentin GROELLY Sandrine QUEVREUX Carte maîtresse BUS I2C Carte servomoteurs Carte moteurs & odométrie Carte son et lumières Carte alimentation Carte capteurs Mécanique Un châssis en aluminium, choisi pour bien fixer les moteurs et pour sa légèreté. Ascenseur à linteau : On y place le linteau au début du match. Il dépose le linteau sur les deux colonnes amenées par les pinces. Deux roues proches du centre de gravité pour tourner efficacement et une bille en cage pour être isostatique. Partie «ÉVOLUTIVE » Deux moteurs pas à pas : À l'aide d'une ficelle et de poulies, il font monter ou descendre les ascenseurs. Partie « INVARIANTE » Plusieurs étages (en plexiglas) permettent de placer les différentes cartes électroniques tout en laissant apparaitre le cœur du robot. La face avant est prévue pour fixer et intégrer la partie évolutive. Des capteurs infrarouge permettent de détecter la présence de l’adversaire afin de l’éviter. Deux pinces : Elles peuvent porter deux palets chacune. Elles se placent de chaque côté d'un distributeur vertical et sont contrôlées par des servomoteurs. Elles sont montées sur un ascenseur pour monter ou descendre les palets. La batterie est placée à l’arrière de manière à pouvoir la changer facilement et rapidement, mais aussi pour équilibrer le robot. Électronique Un bus I²C est au cœur de l’architecture électronique. C’est lui qui fait la connexion entre la carte maîtresse (qui contient la stratégie) et les différentes cartes qui ont chacune un rôle spécifique. Toutes les cartes sont équipées d’un PIC. Doigt : Il pousse les palets sous les pinces quand le robot est contre le distributeur. Il est rangé sur un côté quand le robot se déplace. STRATÉGIE • Notre stratégie consiste à • Pré-charger le linteau • Aller chercher 4 palets répartis dans 2 pinces dans un distributeur • Pousser des palets dans la zone 1 • Aller sur l’îlot pour déposer les 2 colonnes et placer le linteau dessus. Ainsi, un temple sera construit.