Download
1 / 45
450 likes | 465 Views
Learn about the universal relay family's dynamic bus replica operation and CT saturation problems with directional principles. Discover the configuration for protection, metering, and benefits. Explore examples and Q&As.

E N D
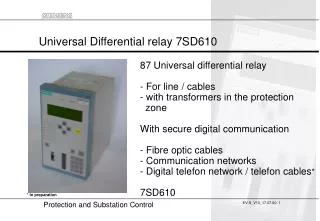
Universal Relay Family B30Bus Differential Relay
Contents... Features CT Saturation Problem Theory of Operation Dynamic Bus Replica Operation Examples (link) Q&As (link) Benefits
Features • Configuration: • up to 5 feeders with bus voltage • up to 6 feeders without bus voltage
Features • Protection: • Low-impedance biased differential protection • CT saturation immunity • sub-cycle tripping time • dynamic 1-out-of-2 or 2-out-of-2 operation • Unbiased differential protection • Dynamic bus replica • CT trouble monitoring • Undervoltage (2 elements) • Phase Overcurrent (2 elements)
Features • Metering: • Oscillography • Event Recorder • Phasors / true RMS
CT saturation problem • During an external fault • fault current may be supplied by a number of sources • the CTs on the faulted circuit may saturate • saturation of the CTs creates a current unbalance and violates the differential principle • a conventional restraining current may not be sufficient to prevent maloperation • CT saturation detection and a directional principle enhance through-fault stability
DIFFERENTIAL – RESTRAINT Point t2 t0 DIF – differential RES – restraining t0 – fault inception t2 – fault conditions External fault: ideal CTs
DIFFERENTIAL – RESTRAINT Point t2 t0 DIF – differential RES – restraining t0 – fault inception t2 – fault conditions External fault: ratio mismatch
DIFFERENTIAL – RESTRAINT Point t2 t1 t0 DIF – differential RES – restraining t0 – fault inception t1 – CT starts to saturate t2 – fault conditions External fault: CT saturation
DIFFERENTIAL – RESTRAINT Point t2 t0 DIF – differential RES – restraining t0 – fault inception t2 – fault conditions Internal fault: high current
DIFFERENTIAL – RESTRAINT Point t2 t0 DIF – differential RES – restraining t0 – fault inception t2 – fault conditions Internal fault: low current
DIFFERENTIAL – RESTRAINT Point t2 t1 t0 DIF – differential RES – restraining t0 – fault inception t1 – CT starts to saturate t2 – fault conditions External fault: extreme CT saturation
Operating principles • Combination of • low-impedance biased differential • directional (phase comparison) • Adaptively switched between • 1-out-of-2 operating mode • 2-out-of-2 operating mode • by • Saturation Detector
Biased Characteristic: Restraining Current • Restraining Current is a “maximum of” the bus zone currents : • better stability on external faults (as compared to the “average of” definition) • better sensitivity on internal faults (as compared to the “sum of” definition)
Biased Characteristic: Shape • Two breakpoints • Two slopes • both slopes provide TRUE percentage restraint, i.e. they are represented by straight lines crossing the origin of the differential-restraining plane • if the slopes are different, discontinuity of the characteristic occurs • the discontinuity issue is solved by a smooth “gluing” function
Biased Characteristic: Shape HIGH SLOPE LOW SLOPE PICKUP LOW BPNT HIGH BPNT
Biased Characteristic: Two distinctive regions • low currents • saturation possible due to dc offset • saturation very difficult to detect • more security required
Biased Characteristic: Two distinctive regions • large currents • quick saturation possible due to large magnitude • saturation easier to detect • security required only if saturation detected
Logic AND OR OR TRIP AND DIF1 DIR SAT DIF2
Logic AND OR OR TRIP AND DIF1 DIR SAT DIF2
Directional principle • Internal faults - all currents approximately in phase
Directional principle • External faults - one current approximately out of phase
Directional principle • Check all the angles • Select the maximum current contributor and check its position against the sum of all the remaining currents • Select major current contributors and check their positions against the sum of all the remaining currents
Logic AND OR OR TRIP AND DIF1 DIR SAT DIF2
Saturation Detector t2 t1 t0 • differential-restraining trajectory • dI/dt t0 – fault inception t1 – CT starts to saturate t2 – fault conditions External fault: CT saturation
Saturation Detector Sample External Fault on Feeder 1 (Case 1)
Saturation Detector Analysis of the DIF-RES trajectory enables the B30 to detect CT saturation (Case 1)
Saturation Detector Sample External Fault on Feeder 4 - severe CT saturation after 1.5msec (Case 2)
Saturation Detector dI/dt principle enables the B30 to detect CT saturation (Case 2)
Saturation Detector • Operation: • The SAT flag WILL NOT set during internal faults whether or not the CT saturates • The SAT flag WILL SET during external faults whether or not the CT saturates • The SAT flag is NOT used to block the relay but to switch to 2-out-of-2 operating principle
Examples • The oscillograms on the next two slides were captured from a B30 relay under test on a real-time digital power system simulator
Dynamic Bus Replica • The dynamic bus replica mechanism is provided by associating a status signal with each current of the differential zone • The status signal is a FlexLogicTM operand • The status signals are formed in FlexLogicTM – including any filtering or extra security checks – from the positions of switches and/or breakers
Dynamic Bus Replica BUS SECTION 1 BUS SECTION 2 BUS ZONE 1A STATUS Cont Ip 1 On BUS BUS ZONE 1A SOURCE U7a Z1 TM FLEXLOGIC SOURCES F1 SRC 1
Dynamic Bus Replica: Example B30 #1
Dynamic Bus Replica: Example B30 #2
Dynamic Bus Replica: Zoning B30 #1 D60 #1 B30 #2
Benefits • Sensitive settings are possible • Very good through-fault stability • Fast operation: • fast form-C contacts and FlexLogicTM operands: typically 10-12ms • form-A trip rated contacts: typically 13-15ms • Benefits of the UR platform (metering and oscillography, event recorder, FlexLogicTM, fast peer-to-peer communication, etc.)