Download
1 / 8
80 likes | 238 Views
1. osa. Etalonmudeliga adaptiivsüsteemid Reference Model based A daptive Control teoreetiline materjal: prof. Ennu Rüstern’i loengumaterjal “Ülevaade adaptiivsüsteemidest”. Adaptiivsüsteemi struktuurskeem Structure of an Adaptive System.

E N D
1. osa Etalonmudeliga adaptiivsüsteemid ReferenceModelbasedAdaptiveControl teoreetiline materjal: prof. Ennu Rüstern’i loengumaterjal “Ülevaade adaptiivsüsteemidest”
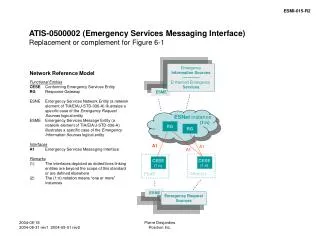
Adaptiivsüsteemi struktuurskeemStructure of an Adaptive System Informatsiooniline tagasiside –adaptiivalgoritm/ feedback – adaptation (turning) algorithm Parameetrite häälestamine /Parameter turning w(t) Juhitav süsteem/ controlled system Regulaator/ controller y(t) u(t)
ym(t) Adaptiivalgoritm/ adaptation algorithm Etalonmudel/ reference model w(t) Juhitav süsteem/ controlled system Primaar-regulaator/ controller y(t) u(t) Etalonmudeliga adaptiivsüsteemReference Model based Adaptive System
Juhtimis-kriteerium/ control criteria Parameetrite hindamine/ parameter estimation Regulaatori arvutus/ controller computation R w(t) Juhitav süsteem/ controlled system Primaar-regulaator/ controller y(t) u(t) Identifitseerimisega adaptiivsüsteemidIdentification basedAdaptiveSystem
Mittelineaarsete süsteemide juhtimine etalonmudeligaReferenceModelbasedControl of a Nonlinear System Juhitav mittelineaarne süsteem/ controlled nonlinear system: kus a , aoja b on konstantsed, aga tundmatud. Olek x(t) ja f(x) on mõõdetavad. Mittelineaarne funktsioon f(x) on sile funktsioon olekust ja f(0)=0. ------ Herea , aoandb are unknown constants. Statex(t) andfunction f(x)are measurable. Nonlinear function f(x)is a smooth functionof stateandf(0)=0. ----- Etalonmudel/ Reference model:
Mittelineaarsete süsteemide juhtimine etalonmudeliga/ ReferenceModelbasedControl of a Nonlinear System Häälestatav regulaator/ turnable controller: Häälestusalgoritmid/ turning algorithm Oleku viga/ Lete the error be Tasakaaluolek e(t)=0, k1(t)=k1, k2(t)=k2 ja ko(t)=ko on stabiilne, mis tähendab, et sünteesitud adaptiivsüsteem järgib täpselt etalonmudelit. Equilibrium state e(t)=0, k1(t)=k1, k2(t)=k2andko(t)=kois stable, which means that the designed adaptive system precisely follows the reference model
Mittelineaarne süsteem – paak (vedeliku nivoo juhtimine) Nonlinear system – tank (liquid level control)