Download
1 / 27
270 likes | 341 Views
Learn about vector addition, polar & Cartesian coordinates, motion analysis, accelerations, scalar quantities, unit vectors, vector components, 2D vector operations, coordinate conversions, and kinematics principles in 2D & 3D dimensions.

E N D
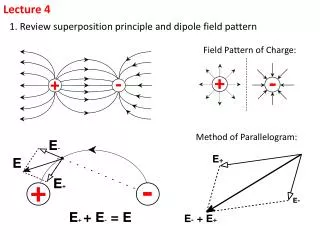
Lecture 4 • Today: Ch. 3 (all) & Ch. 4 (start) • Perform vector algebra (addition and subtraction) • Interconvert between Cartesian and Polar coordinates • Work with 2D motion • Deconstruct motion into x & y or parallel & perpendicular • Obtain velocities • Obtain accelerations Deduce components parallel and perpendicular to the trajectory path
Coordinate Systems and vectors • In 1 dimension, only 1 kind of system, • Linear Coordinates (x) +/- • In 2 dimensions there are two commonly used systems, • Cartesian Coordinates (x,y) • Circular Coordinates (r,q) • In 3 dimensions there are three commonly used systems, • Cartesian Coordinates (x,y,z) • Cylindrical Coordinates (r,q,z) • Spherical Coordinates (r,q,f)
A A Vectors look like... • There are two common ways of indicating that something is a vector quantity: • Boldface notation: A • “Arrow” notation: Aor
A B C Vectors act like… • Vectors have both magnitude and a direction • Vectors: position, displacement, velocity, acceleration • Magnitude of a vector A≡ |A| • For vector addition or subtraction we can shift vector position at will (NO ROTATION) • Two vectors are equal if their directions, magnitudes & units match. A = C A ≠B, B ≠ C
Scalars • A scalar is an ordinary number. • A magnitude ( + or - ), but no direction • May have units (e.g. kg) but can be just a number • No bold face and no arrow on top. • The product of a vector and a scalar is another vector in the same “direction” but with modified magnitude B A = -0.75 B A
Vectors and 2D vector addition • The sum of two vectors is another vector. A = B + C B B A C C
B C 2D Vector subtraction • Vector subtraction can be defined in terms of addition. = B + (-1)C B - C
B - C -C B Different direction and magnitude ! B+C 2D Vector subtraction • Vector subtraction can be defined in terms of addition. = B + (-1)C B - C B -C
U = |U| û û Unit Vectors • A Unit Vectorpoints : a length 1 and no units • Gives a direction. • Unit vector u points in the direction of U • Often denoted with a “hat”: u = û • Useful examples are the cartesian unit vectors [i, j, k] or • Point in the direction of the x, yand z axes. R = rx i + ry j + rz k or R = x i + y j + z k y j x i k z
By C B Bx A Ay Ax Vector addition using components: • Consider, in 2D, C =A + B. (a) C = (Ax i + Ayj ) + (Bxi + Byj ) = (Ax + Bx )i + (Ay + By ) (b)C = (Cx i+ Cy j ) • Comparing components of (a) and (b): • Cx = Ax + Bx • Cy = Ay + By • |C| =[(Cx)2+ (Cy)2 ]1/2
ExampleVector Addition • {3,-4,2} • {4,-2,5} • {5,-2,4} • None of the above • Vector A = {0,2,1} • Vector B = {3,0,2} • Vector C = {1,-4,2} What is the resultant vector, D, from adding A+B+C?
tan-1 ( y / x ) Converting Coordinate Systems (Decomposing vectors) • In polar coordinates the vector R= (r,q) • In Cartesian the vectorR= (rx,ry) = (x,y) • We can convert between the two as follows: y (x,y) r ry rx x • In 3D
Decomposing vectors into componentsA mass on a frictionless inclined plane • A block of mass m slides down a frictionless ramp that makes angle with respect to horizontal. What is its acceleration a ? m a
Decomposing vectors into componentsA mass on a frictionless inclined plane • A block of mass m slides down a frictionless ramp that makes angle with respect to horizontal. What is its acceleration a ? m g sin g = - g j -g cos
Motion in 2 or 3 dimensions • Position • Displacement • Velocity (avg.) • Acceleration (avg.)
v Instantaneous Velocity • But how we think about requires knowledge of the path. • The direction of the instantaneous velocity is alonga line that is tangent to the path of the particle’s direction of motion.
Average Acceleration • The average acceleration of particle motion reflects changes in the instantaneous velocity vector (divided by the time interval during which that change occurs). • Instantaneous acceleration
= + a a a Tangential ║ & radial acceleration Acceleration outcomes: If parallel changes in the magnitude of (speeding up/ slowing down) Perpendicular changes in the direction of (turn left or right)
Kinematics • In 2-dim. position, velocity, and acceleration of a particle: r = x i + y j v = vx i + vy j(i , j unit vectors ) a = ax i + ay j • All this complexity is hidden away in r = r(Dt) v = dr / dt a = d2r / dt2
xvst x 4 0 t Special Case Throwing an object with x along the horizontal and y along the vertical. x and y motion both coexist and t is common to both Let g act in the –y direction, v0x= v0 and v0y= 0 xvsy yvst t = 0 y 4 y x 4 t 0
Another trajectory Can you identify the dynamics in this picture? How many distinct regimes are there? Are vx or vy = 0 ? Is vx >,< or = vy ? xvsy t = 0 y t =10 x
Another trajectory Can you identify the dynamics in this picture? How many distinct regimes are there? 0 < t < 3 3 < t < 7 7 < t < 10 • I. vx = constant = v0 ; vy = 0 • II. vx = vy = v0 • III. vx = 0 ; vy = constant < v0 xvsy t = 0 What can you say about the acceleration? y t =10 x
Exercises 1 & 2 Trajectories with acceleration • A rocket is drifting sideways (from left to right) in deep space, with its engine off, from A to B. It is not near any stars or planets or other outside forces. • Its “constant thrust” engine (i.e., acceleration is constant) is fired at point B and left on for 2 seconds in which time the rocket travels from point B to some point C • Sketch the shape of the path from B to C. • At point C the engine is turned off. • Sketch the shape of the path after point C (Note: a = 0)
B B B C C C B C Exercise 1Trajectories with acceleration • A • B • C • D • None of these From B to C ? A B C D
Exercise 2Trajectories with acceleration • A • B • C • D • None of these C C After C ? A B C C C D
Exercise 2Trajectories with acceleration • A • B • C • D • None of these C C After C ? A B C C C D
Lecture 4 Assignment: Read all of Chapter 4, Ch. 5.1-5.3