Download
1 / 75
750 likes | 798 Views
Explore the world of Micro ElectroMechanical Systems (MEMS) in this detailed outline covering silicon wafer fabrication, MEMS gyroscope chips, digital light processors, and smart dust technology. Learn about the creation of autonomous silicon insects, rigid linkages, power sources, and the genesis of electrostatic inchworm robots.

E N D
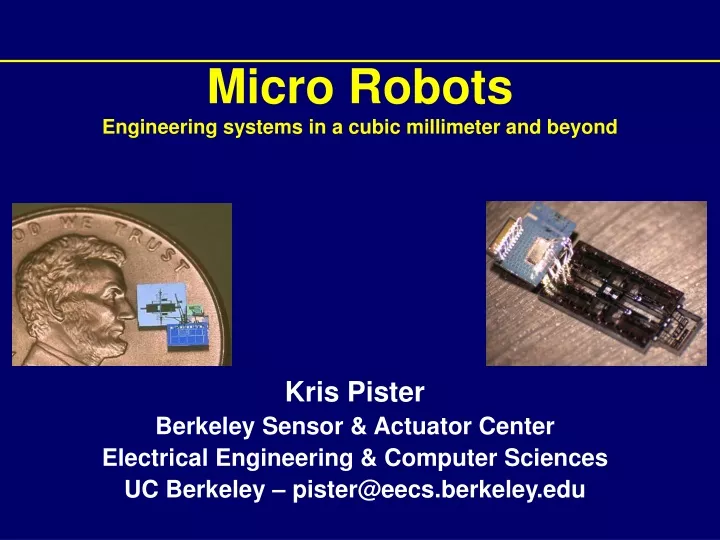
Micro RobotsEngineering systems in a cubic millimeter and beyond Kris Pister Berkeley Sensor & Actuator Center Electrical Engineering & Computer Sciences UC Berkeley – pister@eecs.berkeley.edu
Silicon wafer fabrication – slicing and polishing • Taken from www.egg.or.jp/MSIL/english/index-e.html
Spin Casting • Viscous liquid is poured on center of wafer • Wafer spins at 1000-5000 RPM for ~30s • Baked on hotplates 80-500C for 10-1000s • Application of etchants and solvents, rinsing • Deposition of polymers, sol-gel precursors
Moore’s Law, take 2 • Nanochips on a dime (Prof. Steve Smith, EECS)
What is MEMS? • MEMS is Micro ElectroMechanical Systems • Integrated circuit processing + micromachining • = Sensors, Motors, Structures, Electronics • Systems on a micron to centimeter scale
Digital Output MEMS Gyroscope Chip Proof Mass SenseCircuit Rotation induces Coriolis acceleration Electrostatic Drive Circuit J. Seeger, X. Jiang, and B. Boser
1mm Drive 0.01Å Sense MEMS Gyroscope Chip J. Seeger, X. Jiang, and B. Boser
Digital Output MEMS Gyroscope Chip Proof Mass SenseCircuit Rotation induces Coriolis acceleration Electrostatic Drive Circuit J. Seeger, X. Jiang, and B. Boser
Synthetic Insectsc. 1994 Goal: Make silicon walk. • Autonomous • Articulated • Size ~ 1-10 mm • Speed ~ 1mm/s
Slider Friction Test Device connecting-rod force gauge lever arm shuttle
D R6 R3 R2 q2 R1 R6 R4 D2 q3 q1 R5 2nd Link Mechanical Coupling Slider Crank + Five Bar Linkage D= f(D2,R1,R2,R3,R4,R5,R6,q1,q2,q3)
1st Link Motor 2nd Link Motor Actuating the Legs
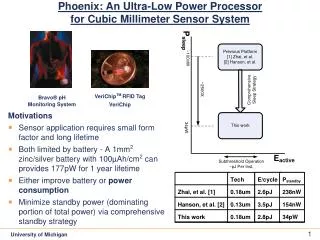
RECEIVER OPTICAL IN SENSORS ADC FSM 375 kbps 16 mm3 total circumscribed volume ~4.8 mm3 total displaced volume 8-bits PHOTO TRANSMITTER OPTICAL OUT 175 bps 1V 1-2V 3-8V 1V 1V 2V SOLAR POWER Smart Dust, 2002
Micro-power CMOS SOC • Records • 1 MIP, 8 bit uP • 10uA @ 1V • 100kS/s 8 bit ADC • 2uA @ 1V • 20pJ/S • 50kbps 900MHz transceiver • TX: 400uA @ 3V, -7dBm • RX: 400uA @ 3V, -85dBm • Integration • uP, RAM, temp sensor, ADC, RF TX • RF TX+RX
Power and Energy • Sources • Solar cells ~0.1mW/mm2, ~1J/day/mm2 • Combustion/Thermopiles • Storage • Batteries ~1 J/mm3 • Capacitors ~0.01 J/mm3 • Usage • Digital computation: nJ/instruction • Analog circuitry: nJ/sample • Communication: nJ/bit 10 pJ 20 pJ/sample 11 pJ RX, 2pJ TX (optical) 10 nJ/bit RF
Energy and Mobility • “Specific Altitude” • 100% conversion of chemical energy to potential energy (mgh) • 250 Whr/kg ~= 1 MJ/kg ~= 100km • Going sideways is not the same as going up • Gait efficiency
Mobility • Rolling • Flying • Walking
Mobility Spyplanes.com
Dust Delivery • Silicon maple seeds, dandelions 1mm^3 Solar power, Gossamer wings
Autonomous Microrobot Anita Flynn, Seth Hollar Legs Solar Cells CMOS Sequencer Motors 8.6 mm
Microrobot – Three Processes “The Actuation” – Hinges, Motors, Legs, Frame “The Power” – Solar Cell Arrays and High Voltage Transistors “The Brain” - CMOS Digital Circuits
Individual test cells with increasing area show high degree of consistency. Solar Cell Results Best estimated efficiency > 14% under solar illumination.
Solar Cell Results 0.5 to 100 V demonstrated 10-14% efficiency
High Voltage Buffers • 90 cells in series: ~50 V • 8 high voltage buffers 16x Inverter • 3 V input to 50 V output • Single solar cells up to 14% efficient Vout 61x Vin Vin Vin 13x Cross-coupled inverters
Layout for Motor and Legs Motor Solar Cells CMOS Legs Linkages Motor 7.6 mm
Genesis of the Electrostatic Inchworm • Electrostatic Gap-closers • compact • high force • small displacement • Actin / myosin • compact • high force • small displacement
Shoe Actuators Residual Stress Stiction Large Structures Large Force MUMPs Inchworm Motors c. 1996 guides shoes Shuttle Gap Stop
1mm Silicon Inchworm Motors