Download
1 / 3
30 likes | 127 Views
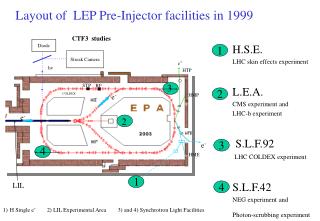
Automotive OEP VU/ISIS Experiment. What is being demonstrated? Tool integration: Matlab –T1-> XML –T2-> ECSL A new modeling language: ECSL: similar to ML/SF/SL, but supports non-ML constructs Code generator ECSL –G-> C code for the platform. Matlab2XML. XML2ECSL.

E N D
Automotive OEPVU/ISIS Experiment What is being demonstrated? • Tool integration: • Matlab –T1-> XML –T2-> ECSL • A new modeling language: • ECSL: similar to ML/SF/SL, but supports non-ML constructs • Code generator • ECSL –G-> C code for the platform
Matlab2XML XML2ECSL Automotive OEPVU/ISIS Experiment Tool-chain ECSL: Dataflow + Statecharts MATLAB Simulink Stateflow MDL (physical) form MATLAB (logical) form MDL MATLAB.DTD ECSL/GME XML ECSL2C C code To platform
Automotive OEPVU/ISIS Experiment Properties • Input: MDL files are automatically imported (tested with ETC) • Output: Fully generated code for discrete-time and Stateflow blocks • ECSL can be used to annotate the models (e.g. data typing, scaling, task allocation, scheduling,…) • Needs: PC (Win2K), Matlab, GME, C compiler for target • Interface to OSEK: • Single-threaded C code • Call top-level function: • void func(i1,i2,..,in,&o1,&o2,…,&om) • Will provide detailed doc by 2/6/02 • Ask UCB • To develop the I/O driver code • To test generated code on physical platform • Delivery date: 2/15/02 • Metrics: • Able to run code on physical system & functional • Code is of comparable size/speed to hand-code • POC-s: • Sandeep Neema (neemask@vuse.vanderbilt.edu) • Andras Lang (andras.lang@vanderbilt.edu)