Download
1 / 29
570 likes | 1.67k Views
Informatique Industrielle. Informatique Industrielle. Formation CESI Ingénieur Génie Électrique Présentation 2/3. Formation CESI Ingénieur Génie Électrique Présentation 2/2. Année 2009. Patrick MONASSIER. La façon dont va se dérouler le cours

E N D
Informatique Industrielle Informatique Industrielle Formation CESI Ingénieur Génie Électrique Présentation 2/3 Formation CESI Ingénieur Génie Électrique Présentation 2/2 Année 2009 Patrick MONASSIER
La façon dont va se dérouler le cours • C’est un cours magistral illustré par des exemples de problématiques industrielles exprimées à l’aide de plusieurs mises en applications vécues. Ces exemples permettent d’introduire des parties de cours théoriques sur la programmation des systèmes informatique industriels et de présenter des applications ayant trouvé des prolongements pratiques dans des domaines variés. • Introduction sur l’informatique industrielle • Application de sécurité d’anticollision sur grues • Supervisions et IHM en lien avec des robots industriels • Systèmes embarqués pour le transport routier (GPS, WIFI, GPRS) • Ces exemples sont issus de cas réels développés et mis en œuvre par l’intervenant
Module Informatique Industrielle (2/2) • 3 Supervisions et IHM en lien avec des robots industriels • · Les architectures informatiquesindustrielles dans des environnements d’usines de production robotisées, ainsi que leurs concepts. • · Les matérielsutilisés et leurs liens via les bus de terrain et Ethernet Industriel • · La façon de programmersur les PC industriels et sur les robots industriels • · La problématique des systèmes dits "réactifs" par rapport aux systèmes classiques "interactifs, transactionnels". • 4 Systèmes embarqués pour le transport routier (GPS, WIFI, GPRS) • Les architectures de communication et de géolocalisation GPS/GPRS. • · Les liens entre le microprocesseur et les périphériques de communication • · Les principes de programmation et l’ordonnancement des actions, les priorités et le traitement des évènements dans le temps. • · La labellisation de projets dans le cadre des Pôles de Compétitivité et des financements OSEO.
Partie 3 – Supervisions et IHM Supervisions et IHM en lien avec des robots industriels
Concept de la pyramide du CIM Supervisions et IHM : définitions Usine Atelier Ilot Cellule Dans l'industrie, la supervision est une technique de suivi et de pilotage informatique de procédés de fabrication automatisés. La supervision concerne l'acquisition de données et la modification manuelle ou automatique des paramètres de commande des processus généralement confiés à des automates programmables, des machines spéciales, des robots… SCADA Supervisory Control And Data Acquisition Système d’information Supervisions IHM Robots Machines L’ Interface Homme - Machine (IHM) représente l’interface informatique proche de la machine, principalement à l’usage de l’opérateur d’atelier. HMI : human-machine interface
Quelques images Les calculateurs PC en rack 19 ’’ Panel PC ShoeBox PC Terminal portatif Baie 19 ’’
Quelques images Les automates programmables Réseau Automate Entrées / sorties Capteurs / Actionneurs
Les robots industriels Quelques images
Les machines spéciales Crées pour une fonction spéciale Elles intègrent : Capteurs, actionneurs, automates, réseaux…..
Quelques images Les capteurs Pression, Température Les actionneurs Position, Angulaires… etc. Vérins Automate Réseaux Moteurs
Les réseaux informatiques permettent de relier entre eux toutes les composantes de l’installation Il n’existe pas de réseau « unique ». Il y a une diversité de choix selon les performances attendues Les réseaux Réseaux et Bus de Terrain
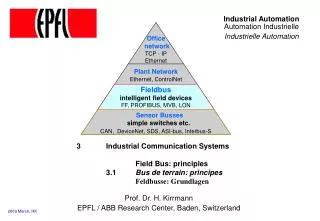
Importance des réseaux dans l’informatique industrielle Le concept de la pyramide du CIM Internet TCP/IP Réseau Ethernet & TCP/IP Réseaux de terrain CAN, FIP, DeviceNet, Interbus,Profibus…
La pyramide du CIM : les réseaux La pyramide du CIM, définit le modèle d'usine industrielle au sens de l'automatisation et de la communication. Actuellement, elle décrit les différents niveaux de communication sous une forme quantitative des données à véhiculer. Le choix du réseau est différent selon les niveaux dans la pyramide. On prendra couramment Ethernet TCP/IP pour les niveaux 1 à 4. Pour le niveau 0, on est dans le domaine des Bus de Terrain Industriels qui offrent rapidité, déterminisme et une très bonne tenue aux contraintes d’environnement. Temps différé Trames longues (Ethernet) • Au niveaux supérieurs, on a de gros paquets de données (fichiers) sans impératif de performance absolue. • Au niveau 0, transfert performant - peu d’informations mais très rapidement Trames courtes Trames courtes Trames courtes Temps réel Il y a 2 exigences impératives vis à vis des réseaux industriels: Sécurité de l’information : l’erreur peut être dangereuse... Déterminisme : faculté de transférer des données dans un temps donné.
Le Computer Integrated Manufacturing (CIM) est un concept décrivant l'automatisation complète des processus de fabrication. C’est-à-dire que tous les équipements de l'usine fonctionnent sous le contrôle permanent des ordinateurs, automates programmables et autres systèmes numériques. niveau 3 : la gestion des produits et des stocks, la gestion des approvisionnements, la gestion des clients, des commandes et de la facturation (gérés par les ERP) niveau 2 : la localisation des produits en stocks, les mouvements physiques et la gestion des lots (géré par le système de gestion d'entrepôt) niveau 1 : les automatismes niveau 0 : les capteurs et actionneurs.
La pyramide du CIM (Computer Integrated Manufacturing) est une méthode largement généralisée (en particulier dans l'informatique). Il s'agit d'une représentation comportant 4 niveaux auxquels correspondent des niveaux de décision. Plus on s'élève dans la Pyramide du CIM, plus le niveau de décision est important, plus la visibilité est globale et plus les cycles standards s'allongent. Un niveau supérieur décide ce qu'un niveau inférieur exécute
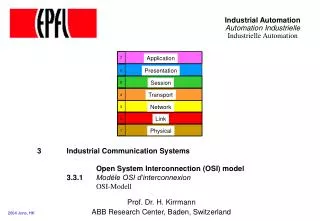
4 Implémentation des protocoles TCP/IP Ethernet TCP/IP s'est développé sur les architectures d'automatisme et est devenu un réseau fédérateur à partir du niveau 2 du CIM. Aujourd'hui, nous pouvons envisager la descente d'Ethernet TCP/IP sur le bas des architectures d'automatisme (au niveau 1 dans un premier temps) afin de répondre aux nouveaux besoins fonctionnels des composants d'automatisme A la recherche d'une norme d'accès : TCP / IP Internet L'accès par internet se fait à tous les niveaux en horizontal, TCP/IP devient la norme fédératrice. TCP / IP
5 Un nouveau modèle de pyramide aplanie Modèle pyramide du CIM Evolution du modèle Informatique Informatique MES, ERP MES, ERP, SCADA SCADA, IHM IHM, Contrôle commande, API Contrôle commande, API Capteurs / actionneurs Capteurs / actionneurs MES Manufacturing Execution System ERP Entreprise Ressource Planning SCADA Superviseur IHM Interface Homme Machine API Automate Programmable
7 Une nouvelle architecture machine Le constructeur de machine pourra simplement se créer des modules programmes génériques reflétant son savoir-faire. L'intégrateur aura pour tâche le développement de modules génériques fédérateurs des savoir-faire constructeurs. Enfin, chacun d'entre eux pourra développer le e-service ( Télédi@gnostic, télém@intenance). • Intégrateur : • - Modules génériques • fédérateurs Ethernet TCP / IP Web Server • Accès direct : • Simple navigateur • Internet Services logiciels constructeurs Internet • e-services • Télédi @ gnostic • télém @ intenance Intranet / extranet entreprise
Un exemple d’intégration en WebServer On met un site internet dans le robot Robot principal Fonctions WebServer et Maintenance Fonction Maintenance Armoire électrique MODEM Ethernet TCP/IP CELLULE HUB ATELIER BUREAUX Interface Opérateur EXPLOITATION EXPLOITATION EXPLOITATION MAINTENANCE MAINTENANCE Exploitation des Résultats avec Excel Windows, calculs des TRS MAINTENANCE A DISTANCE MAINTENANCE A DISTANCE MAINTENANCE A DISTANCE MAINTENANCE A DISTANCE MAINTENANCE A DISTANCE PRODUCTION PRODUCTION PRODUCTION PRODUCTION
Supervisions • Collecter les données • Traiter les informations • Créer les bases de données • Diffuser les résultats
Supervisions Les supervisions collectent et traitent les Informations venant des robots. Elles sont à la base du système d’information de l’usine. Serveur usine Supervision Temps de Marche Temps de Défauts Gestion des postes Temps d ’ arrêt Temps d ’ attente Productions Alarmes Paramètres machines Supervision En dialogue permanent avec les robots Supervision
- Synoptique - Production et temps - Alarmes - Postes de travail Détails d’une supervision
Gestion d’une usine • 21 robots connectés L’usine intégrée - Concept CIM Supervisions et système d’information
Supervision et système d’informationUn exemple d’application complète, 21 robots connectés Systèmes d’analyses évolués Bases de donnée Contrôles, Traçabilité, Suivi de production… Vers les serveursinformatiques Le système d’information collecte l’ensemble des données et les met à disposition des différents utilisateurs L’ordinateur central assure le suivi du convoyage et l’identification des pièces (étiquettes électroniques) Les contrôles Qualité sont effectués en continu et les résultats enregistrés par le système d’information Différents niveaux de réseaux informatiques et industriels assurent le flux des données entre les robots et les ordinateurs
Présentation et discussion Présentation en dynamique d’un programmation Supervision en Windev Contraintes liées aux réseaux indutriels et différence avec Ethernet Arrivée d’Ethernet Industriel
Système réactif Exercice :mise en place des mécanismes assurant la réactivité du système global en fonction des contraintes De chaque opérateur ou intervenant Autres intervenants dans la pyramide du CIM PRODUCTION MAINTENANCE A DISTANCE Limite de la cellule EXPLOITATION MAINTENANCE Flux de matière Electronique Bus de Terrain Capteurs/actionneurs
Fin de la Partie 3 « Supervisions et IHM» Informatique IndustrielleFormation CESIIngénieur Génie Électrique